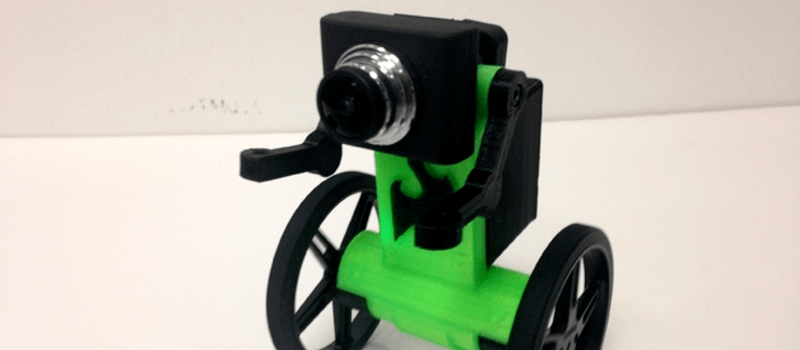
Eddie is a surprisingly capable tiny balancing robot based around the Intel Edison from which it takes its name.
Eddie’s frame is 3D printed and comes in camera and top hat editions. The camera edition provides space for a webcam to be mounted, since the Edison has enough go power to do basic vision. The top hat edition just lets you 3D print a tiny top hat for the robot.
The electronics are based around the Edison board and Sparkfun’s set of, “Blocks” designed for it. This project needs the battery block, the H-Bridge block, the GPIO block, and the USB block along with a 9DOF block for balancing. It’s, somewhat unfortunately, not a cheap robot. The motors are Pololu all-metal gearmotors with hall-effect sensors acting as encoders.
We’re really impressed with [diabetemonster]’s design and documentation on the robot. Full source code is provided along with a very nice build guide to get the platform going fast.
There are a few videos of it in action, available after the break. They show it handling situation such as a load being placed on the robot and slopes as well as bonus features like dancing and remote control.














If your software has a bug and the robot crashes into something,
Is it an EddiePlus wrecks?
Sorry, I couldn’t resist the pun.
Next time be this…
http://www.buzzle.com/images/electricals/symbols/resistor-ieee.png
It really needs “pass the butter” function.
https://www.youtube.com/watch?v=3ht-ZyJOV2k
Oh no! That robot had the saddest line in that episode!
YOU FUCKERS BEAT ME TO IT!
Nice merchandise for SparkFun and intel!
Edison + i/o $50 + $23 + $35 = 108$ + shipping
Can’t we do that with ESP8266, 6DOF IMU and dual h-bridge
that would be less than 15$ incl shipping ?
a nice toy..i love it ..
I have thought about trying a balancing robot project that can handle variable loads. I thought that a PID would not be sufficient to do this and a state variable control approach would be necessary. I looked through the code and see that it uses two PID loops– one for tilt angle and another for wheel speed. I imagine the control variable is wheel speed and the tilt angle setpoint needs to be adjusted after the center of balance is changed. How this is achieved is not readily apparent. Can someone [diabetemonster?], explain the connection between wheel speed and desired tilt angle? Picture worth a thousand words?
Possibly the other way, in which you want to control Wheel speed (Zero speed = standing in place), and you’re using tilt angle as an input?
http://hackaday.com/2015/02/24/eddieplus-the-edison-based-balancing-robot/
One year ago :D
Thanks for bringing it to my attention. That’s embarrassing:( My search-sensei would disown me if he knew how weak my search-fu has apparently gotten.
Jesus, that really had to be removed when it was clearly in jest? All the vitriolic crap I see spewing out of people in any given comments section on this site an I get edited for THAT?! Well, it was a good run here.
Sorry, you’re probably right. I changed it back.