It’s crazy to think that we’ve optimized the heck out of some types of powered flight when there are entire theories and methods that haven’t even seen many government research dollars, let alone the light of day. The cyclocopter is apparently one of those. It was dreamt up around the same time as a helicopter, but was too audacious for the material science of the time. We have helicopters, but [Professor Moble Benedict] and his graduate students, [Carl Runco] and [David Coleman], hope to bring cyclocopters to reality soon.
For obvious reasons they remind us of cyclocranes, as the wings rotate around their global axis, they also rotate back and forth in a cycloidal pattern around their local axis. By changing this pattern a little bit, the cyclocopter can generate a wide variety of thrust vectors, and, hopefully, zip around all over the place. Of course, just as a helicopter needs a prop perpendicular to its main rotor on its tail to keep if from spinning around its axis, the cyclocopter needs a prop facing upwards on its tail.
It does have a small problem though. The bending force on its wings are so strong that they tend to want to snap and fly off in all different directions. Fortunately in the past hundred years we’ve gotten ridiculously good at certain kinds of material science. Especially when it comes to composites we might actually be able to build blades for these things. If we can do that, then the sky’s the limit.
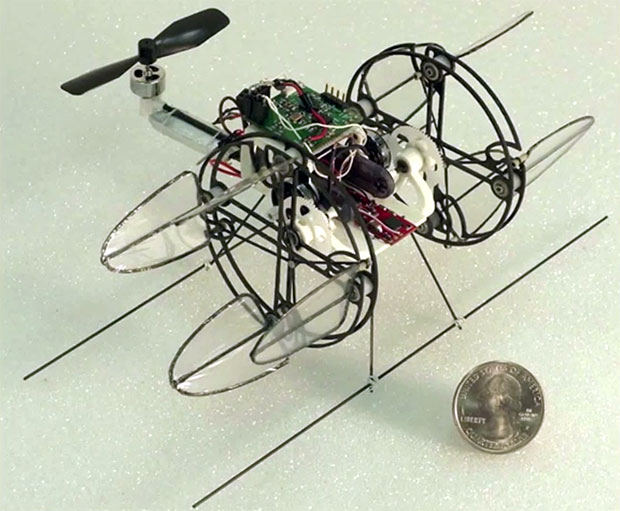
[Professor Benedict] and his team are starting small. Very small. Their first copter weighs in under 30 grams. It took them two years of research to build. It will hopefully lead to bigger and bigger cyclocopters until, perhaps, we can even build one a person can get into, and get out of again.














That would be a Voith Schneider propeller for a somewhat less dense fluid [ref. http://www.voith.com/en/products-services/power-transmission/vsp-voith-schneider-propeller-10002.html%5D physics is all there, as mentioned its the materials that will be the issue in the translation.
“Broken” link. I have found that removing the %5D from the end fixes it
Is there a reason they couldn’t add an outer ring to tie all the blades together? It could be rigidly attached to the primary ring.
Likely a combination of weight and interference with fluid dynamics at the tips of the wings.
These guys do:
https://www.youtube.com/watch?v=nDhlehsYiGc
While there may be some use for this configuration in small UAV’s it will not scale well and offers no major advantage over current VTOL craft designs.
The proper name for these is “Cyclogyro” I think. As above, the Voigth Schneider propeller adapted to air rather than water.
https://en.wikipedia.org/wiki/Cyclogyro
https://en.wikipedia.org/wiki/Cyclogyro#/media/File:Cyclogyro.svg
Hmmm. These guys aren’t at the forefront…….
Try this on for size:
https://www.youtube.com/watch?v=VEP4KYqkF4k
that music tho.
Ok srsly I know it’s cool, but WHY are they doing this? I mean if you’re going to have 4 motors, does this provide any benefit at all over classic quadcopters? Is there any point beyond “for science!”?
According to early theory, these were supposed to have better efficiency than normal rotors at all speeds. In practice, this doesn’t happen yet. I’m not clear if this is because the theoretical models had too many bad assumptions (the unsteady flow each blade sees is really hard to model), or because the drag from all the non-airfoil components just eats up the gains in every practical realization we’ve been able to come up with. (It’s worth noting that cyclogyros not only have more non-aerodynamic structure, they inevitably have parts of those structural components moving at blade speed, whereas all the non-aerodynamic portions of a helicopter rotor are near the hub, and thus at small speeds, thus less drag.)
It’s still possible they could do better at high forward speeds, where conventional rotors are limited by retreating blade stall and transonic flow on the advancing blade. I see the theoretical argument, and think it’s a good idea someone’s trying, but I’m not convinced it’s practical.
To me it seems more like…. hey, biplanes are more inefficient than monoplanes right? And helicopters are less efficient than fixed wing? Awesome! Let’s build a helicopter as if it was a biplane!
I’m gonna wait for ornithopters. I would never fly in a craft that so Clearly wants to break under load.
This is the kind of thing you do when helicopter patents are ruinous to license, then abandon when they expire.
It seems the smaller you make this the faster the pitch servos must move to change the pitch effectively.
Or is there some sort of mechanical pitch preset?
I think there is one servo that adjusts a center cam, with a linkage around it to each blade. As the blades go around, they make a sinusoidal motion determined by the servo, but they are not individually controllable.