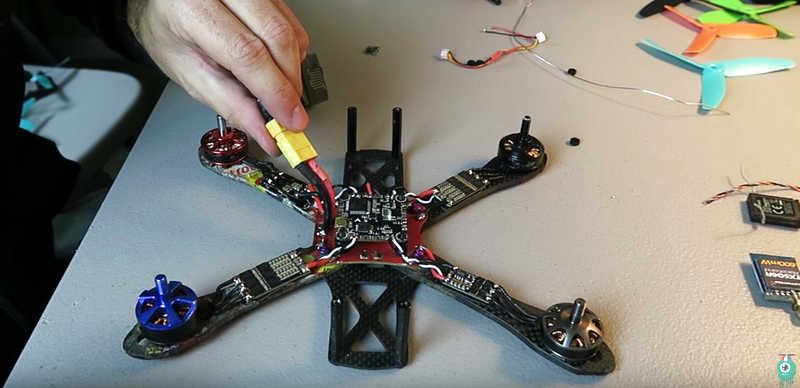
Modern quadcopter flight controllers perform a delicate dance of balancing pitch, yaw, bank, and throttle. They can do this thanks to modern MEMS gyros and accelerometers. The job is easy when the motors, propellers and speed controllers are relatively well matched. But what if they’re not? That’s the questions [SkitzoFPV] set out to answer by building Frankenquad. Frankenquad is a 250 sized FPV quadcopter with 4 different motors and 4 different propellers. The props are different sizes from different manufacturers, and even include a mix of 3 and 4 blade units. If all that wasn’t enough [SkitzoFPV] used 3 different electronic speed controller. Each speed controller has a micro running different firmware, meaning it will respond slightly differently to throttle inputs.
Keeping all this in check was [SkitzoFPV’s] branded version of the Raceflight Revolt R4 flight controller. The Revolt is powered by an STM32F4 series ARM microcontroller. Most of these controllers run variants of the cleanflight open source flight control software. The question was – would it be able to handle the unbalanced thrust and torque of 4 different power combinations?
The flight tests proved the answer was a resounding yes. The quad hovered easily. As the video shows [SkitzoFPV] went on to burn a few holes in the sky with it. Admittedly [SkitzoFPV] is a much better pilot than any of us. He did notice a bit of a bobble and a definite yaw toward the smaller propeller. Still, it’s rather amazing how easily a modern flight controller was able to turn a pile of junk-box components into a flying quadcopter. You can learn more about flight controllers right here.














Wow… That works great! I guess if you take the time to balance all the components you really can just mix and match.
Hmmm perhaps I do not understand coprrectly. So correct me if I’m wrong.
But a quadcopter is a system that only can fly because of electronics that balance the platform by increasing or decreasing the motor RPM of each an every motor on the platform. Not because every motor behaves exactly the same, sure it helps if all motors are identical but that would only be the case in a perfect world. And now suddenly, we are suppost to be surprised that the electronics system regulating and balancing actually regulates and balances, wow!
More interesting perhaps was if the guy actually modified the system (badly) to the point it could no longer compensate for all the weight/thrust/inertia/etc problems. Perhaps he’ll make a video of that.
Actually those systems are designed to work when all the components are identical and are designed to compensate for minor variances in the parts. This is way more than they where intended to correct. It would not be surprised if you called a given manufacturer for one part and asked about using it with a part made by a different manufacturer they would tell you that it won’t work. Obviously it seems to work quite well judging from the video, but nobody makes them to function in this scenario.
I want to add that it would be informative to compare the compensation of RPM of each motor in this case VS normal case.
There was an MIT research project for autonomous, adaptive quadcopters. The presenter grabbed one, broke off a rotor arm, and tossed the quad back into the air. It floundered a bit but quickly stabilized. The presented grabbed it again and broke off another rotor, leaving just 2 rotors that spun in the same direction.
The drone (bicopter?) floundered again but stabilized before hitting the ground. It was spinning constantly, though, from the rotor torque. The miracle was when the presenter commanded the drone to go, the drone started navigating as smoothly as ever, compensating for the spin the whole time.
The Frakenquad is cool, but that’s just cooler.
I believe you’re talking about this TED demo
https://www.youtube.com/watch?v=w2itwFJCgFQ
Yeah, don’t think they’re from MIT. ;) And they do use a few fun tricks that most people won’t notice or know about. First is that the guy doesn’t just remove the two motors or the two propellers, he trims the propellers to a length where they don’t contribute any real lift but they still generate enough thrust to balance the quad in this one axis. I’ve seen people claim that this was a proof a quad could fly with just three or two propellers — it can’t… with three technically it depends on where the exact CoG of the copter is, with two all bets are off. And then replicating any of those tricks with off the shelf quads doesn’t take much engineering, the PIDs should already do all the work, although there are some details like most flight controllers cap the integral term at a max and a min value, in this case you’d probably need much higher I limits.
Second is the glass of liquid on a helicopter / multicopter trick that’s been done many times and you can try it for yourself and it’ll probably work.
There is at least one monocopter design out there. It’s based on maple leaves & other helicopter seed pods. As for a dual copter I don’t see why we can’t have them, the CH-47 and many other dual blade helicopters exist. So long as the two that fail aren’t on a shared side the other two should be able to give some semblance of control. Being counter-rotation obviously helps.
Yes, but there’s a difference. You’ll notice most aircraft use 4 actuators because you want to control 4 degrees of freedom. An airplane uses one motor and three control surfaces (three servos basically). A helictoper uses one motor and… 3 servos. A dual copter or “bicopter” whatever uses two motors and two servos to rotate the two motors. A tricopter has 3 motors and one servo.
But a quadcopter that has suffered a failure of two motors has just the two actuators.
There are a few tricks to get by with just three or two actuators though like the maple leaf thing (Lockheed Samarai?) or rightwing flying wings or toy coaxial helicopters. The trick is either to have gravity, inertia and aerodynamic forces stabilise one or two degrees of freedom, or (this one is pretty cool) use inertia in a way that you can frequency- or phase-modulate two or more control signals into the input of just one actuator. This basically means that you can control one DoF by applying an input signal at one point in the full rotation of a rotor, another at a different point, and another by applying it over the full 360degs, similar to cyclic and collective control. The maple leaf wing will control pitch by varying the AoA (using an aileron) in two of the quarters of its rotation, the roll in the other two quarters and thrust by varying the overall average AoA. And since it’s spinning around, same as the 3-motor quadcopter (or the two good props and two short props quadcopter), there’s no yaw control to talk about.
>with two all bets are off.
http://www.aerospaceweb.org/aircraft/transport-m/v22/v22_01.jpg
http://www.diggerhistory.info/images/air-recent/chook-rover.jpg
Exactly what I was talking about. You can use two motors and two servos, or even just one motor and servos. But not a quadcopter without two motors.
No wonder I couldn’t find it. Thanks for the correction and link!
The local lads to me flew a 250mm size quad with a mix of 2, 3, 4 and 6 bladed, quite surprisingly the pilot said that it flew very similar to if all the components matched, and suggested it would be difficult to tell if he had to do a blind comparison, The noise of the blades is strange though.
http://propnuts.co.uk/tech-corner/will-it-fly-prop-pick-n-mix/
We also built up one of the Kooltoyz midge frames with a dual receiver system allowing two pilots on a single quad.
http://propnuts.co.uk/tech-corner/will-fly-two-men-one-quad/
God I cant what till my head set comes in.
It should of been here last month. I hope its not lost in the mail.
Got tons of plans for it.
That was great. good job. Me I agree with you I don’t think it should of flown.
Thanks for the video. Now I’m going to watch some more, and wait for the mail man.