[Mark Mullins] is working on a project called Quamera: a camera that takes video in every direction simultaneously, creating realtime 3D environments on the fly.
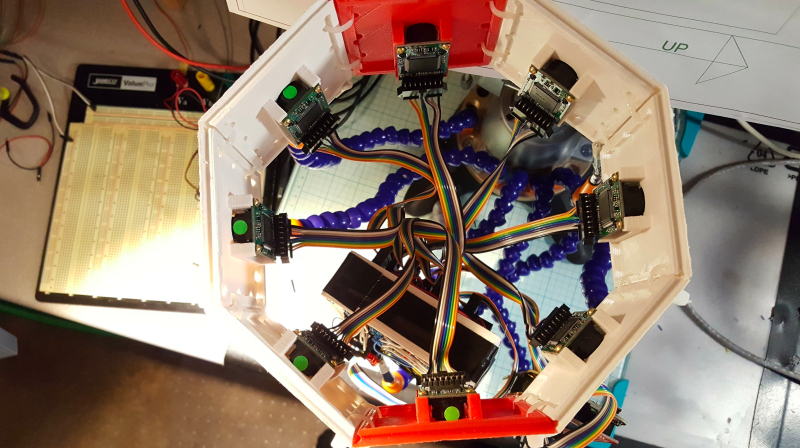
[Mark] is using 26 Arducams, arranging them in a rhombicuboctahedron configuration, which consists of three rings of 8 cameras with each ring controlled by a Beaglebone; the top and bottom rings are angled at 45 degrees, while the center ring looks straight out. The top and bottom cameras are controlled by a fourth Beaglebone, which also serves to communicate with the Nvidia Jetson TX1 that runs everything. Together, these cameras can see in all directions at once, with enough overlap for provide a seamless display for viewers.
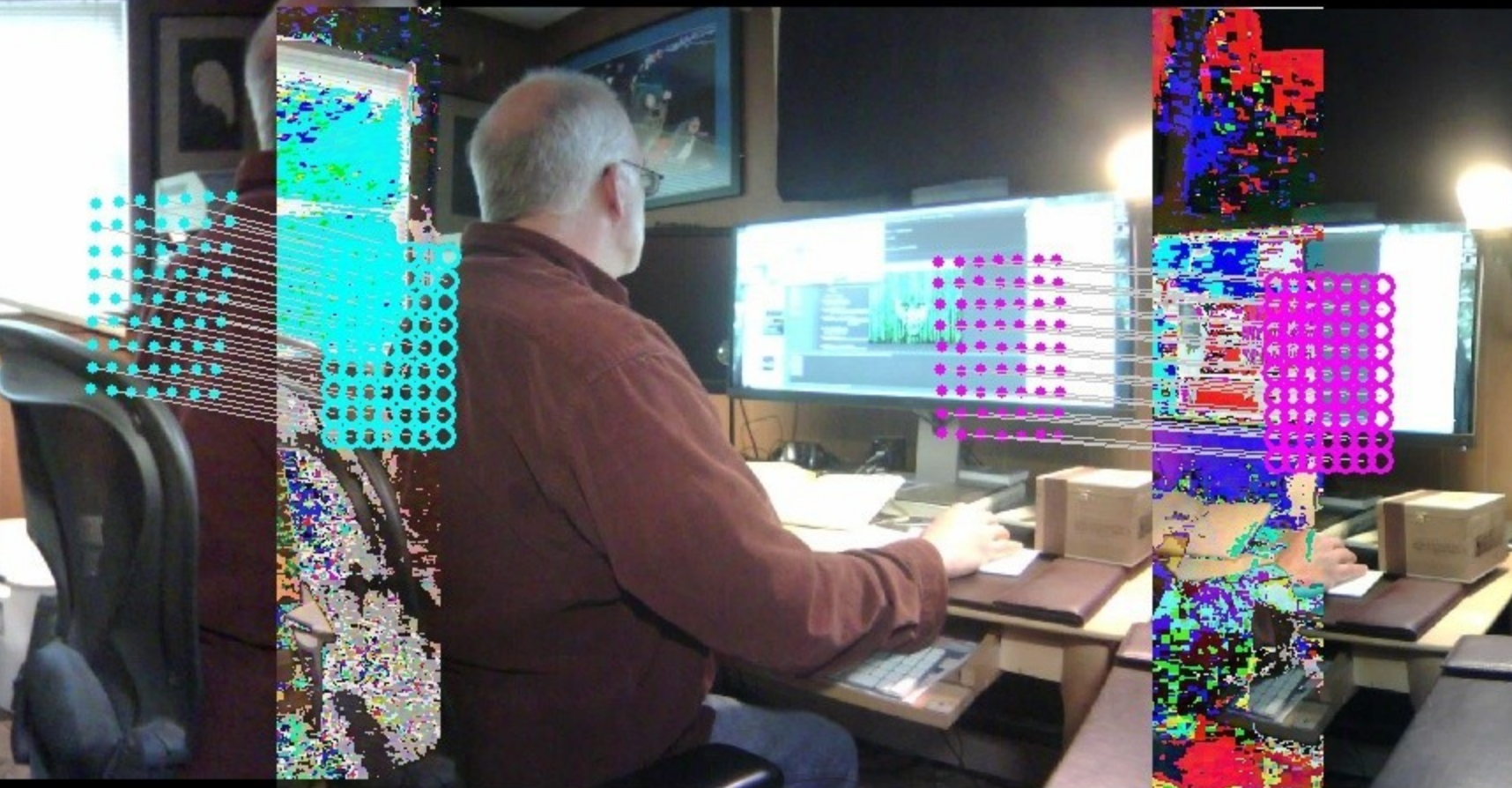 In the image to the right, [Mark] is testing out his software for getting the various cameras to work together. The banks of circles and the dots and lines connecting to them represent the computer’s best guess on how to seamlessly merge the images.
In the image to the right, [Mark] is testing out his software for getting the various cameras to work together. The banks of circles and the dots and lines connecting to them represent the computer’s best guess on how to seamlessly merge the images.
If you want to check out the project in person, [Mark] will be showing off the Quamera at the Dover Mini Maker Faire this August. In the meantime, to learn more about the Jetson check out our thorough overview of the board.














I was doing something similar for fun… now doing something else. =/
Those 360 cameras are not cheap:
https://www.ptgrey.com/ladybug5plus
Good luck ;-)
https://www.engadget.com/2017/05/09/google-street-view-360-degree-camera-support/
Wonder how that compares to Street-view cameras?
GPS correlation to provide a continuous visual map of images along roads, though my guess is that most of that is done back at Google using GPS data.
Interesting to read about it home-brewed here on HaD. The military has stuff like it and way beyond in the belly of drones. Coming next is domestic use of such stitched together camera arrays flying high above your home and town.
seems like if the cameras are statically positioned, the transforms for each camera should be static and not guesswork…
If you don’t have a good lens and camera model of the optics, it’s probably extremely hard to transform the images.
it’s pretty complex to be sure, but hugin has had tools for modeling this stuff for ages. Even as crappy as these cameras are compared to my DSLR, a first-approximate guess would look better than the image in the article.
I just have to ask the obvious (to me)…
It says above that he uses 26 cameras. Three rows of 8 cameras each, top and bottom row mounted at 45 degree angle. Applied math tells me 8×3 = 24. Where are the other two cameras?
…and with sufficient overlap, you can even pull 3D information from the feeds. https://www.jauntvr.com/technology/