If you are anything like us, last time you went bowling, you thought more about how the ball came back to you than actually knocking down the pin. Perhaps you even wondered what it would be like to be a bowling ball making its way back through mysterious and hidden machines. [Wren] and [Erik Beck] did as well, so they set out to make a bowling ball camera to find out.
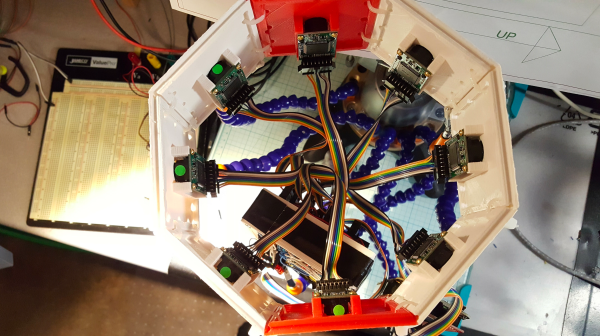
At the heart of the contraption is an Insta360 X5 camera nestled between water-jet cut metal plates. Because each lens of the camera has a 200 degree field of view, anything in the overlap of the two lenses simply does not appear, so the two metal plates likewise, do not appear. This does leave a somewhat noticeable seam down the middle of the footage, but overall worked out very well. To prevent vibrations in the bowling ball, it can only be rolled along the plate line, making said seam appear in all the footage. Because the stabilization is happening purely digitally, and the camera itself is spinning with the ball, motion blur became an issue immediately. Fortunately increasing the shutter speed fixed the issue, along with an increase in ISO to compensate for the decreased exposure.