Usually at Hackaday we like to post projects that are of interest because of their complexity. That’s especially true for robots — the more motors and sensors the better. But, occasionally we come across a project that’s beautiful because of its simplicity. That’s the case with [Max Kern]’s ZeroBot, recently posted over on Hackaday.io.
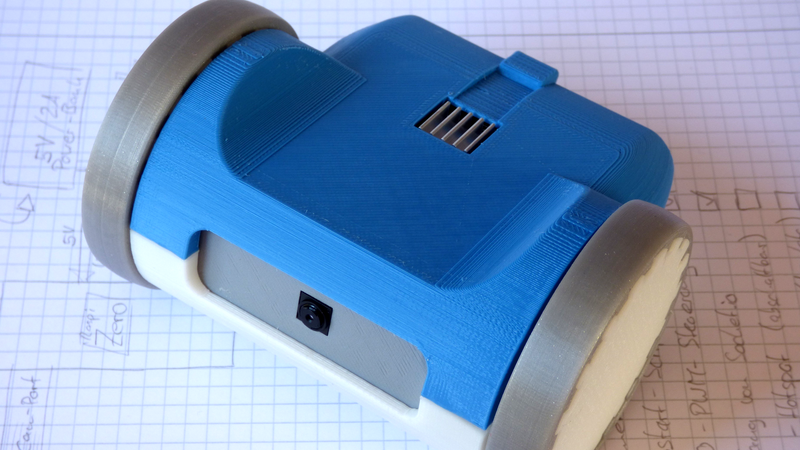
The ZeroBot breaks the essence of a robot down to just the essentials: a Raspberry Pi Zero W for the brains, a driver and two motors for movement, a battery for power, and a camera to see. The chassis is made completely of parts that are easily 3D-printable. The Zero W creates a WiFi access point that users can connect to on a computer or smart phone, and subsequently provides FPV control.
This project is reminiscent of the starter robot kits many of us began our hacking lives with, and it’s a great teaching tool for kids. Print the parts and you can have the robot built-in an afternoon, while still being fun enough to actually play with when you’re done. After the physical robot is built, the possibilities for programming and controlling it are endless.













Now to add some sort of manipulation- pincers, tractor beam, taser, hand, etc…
Reminds me of something from Rainbow Six…
will the body stl files be released?
The files are already on Thingiverse: https://www.thingiverse.com/thing:2352440
thanks totally missed that
Very nice! Just needs a feather on a spring and it would be an awesome IOT “cat toy”. :-)
300 msec != low latency
Latency is a general concept, there is no universal standard for what is low latency and high latency. For an ISP? That’s high latency. For a video call? That’s pretty low.
for remotely controlling a vehicle that’s very high imo
Around 50ms for control input and 200ms for video delay would be acceptable?
it depends on the vehicle, how fast it goes and how it responds to directional controls…300ms would be plenty to control a blimp, but be dismally slow to control a jetfighter.
There are military standards for latency, I don’t know the standard off the top of my head but I remember one requirement for teleoperation was 250 ms from a command being issued until the movement is observed in the video.
Nice RC car. Let me know when he turns it into a robot.
It’s a platform. Why not see what you can do with it?
Do you consider all robotics platforms RC cars, or just the inexpensive ones?
I believe he is referring to the fact that it does not act autonomously. According to a “define: robot” google search:
a machine capable of carrying out a complex series of actions automatically, especially one programmable by a computer.
So while this has the capability to turn into a robot, at the moment, it is a robot wannabe, or a robot in waiting or something similar.
And while the original poster may have meant in in a disparaging way, I do not – I think it is very cool and a useful first step for someone who want to eventually add autonomousness (automonivity? autonomivicity?)
Autonomy is the adjective you’re looking for, I think.
It’s also important to note that autonomy is a sliding scale; tele-operation counts as autonomy, just a very low degree of it. The robot is responding autonomously to commands sent remotely by an operator – ie the operator is not directly controlling the machine, like in the case of a car for example.
Even systems with high degrees of autonomy (think Google’s cars) still only act on commands provided by a human, just at a higher level. There’s also an argument that can be made that any ‘fully’ autonomous system is still following human command because its behaviour is completely defined by the human that wrote the control software.
Definitions like “autonomous” are a pretty grey area!
So this ‘robot’ is as autonomous as a light switch circuit? On that I think we agree.
http://www.dictionary.com/browse/autonomy
But autonomy actually means that the device is free to make decisions by itself.
This does not, so it’s an RC car and HaD screwed up the article again.
I’m very impressed. I would like to figure out a way to have this accessible to the internet without port forwarding. I’ve looked but I can’t find a way to do this through a cell phone connection or some other way that I can attach to a given wifi network and have a bot that is accessible without access to someone’s router. Any ideas?
Have the phone connect to a server. Have your viewer connect to the server. The server then tells them to both connect to each other directly at the same time. I’m fairly sure that will work. I think the process is called nat hole punching.
Have the phone connect to a server. Have your viewer connect to the server. The server then tells them to both connect to each other directly at the same time. I’m fairly sure that will work. I think the process is called nat hole punching. If that doesn’t work you could always figure out a way to send the data to a webserver that then displays it. Also if you can get 6in4(ipv6 tunneled through ipv4) tunnel to work on both clients that could work too or just openvpn.
You can a reverse SSH tunnel. It will give you nearly zero latency, but it will be a little choppy. Use an AWS medium server with Ubuntu 16. Lots of options, and only takes 15 – 20 minutes to set up
I’ve set up a site just for this, robotstreamer.com. There’s an open source project called robotstreamer on github that would run on the robot. The site would process audio streams and control.