Despite the success shown in prototypes from groups like Boston Dynamics, bipedal walking is still really hard to implement. When the robot lifts one leg, it has to shift its center of gravity over the other leg to avoid falling sideways.
The Autonomous Legged Personal Helper Robot with Enhanced Dynamics (ALPHRED) is getting around this problem by coming at it from a different angle. ALPHRED walks sideways and throws away the distinction between arms and legs.
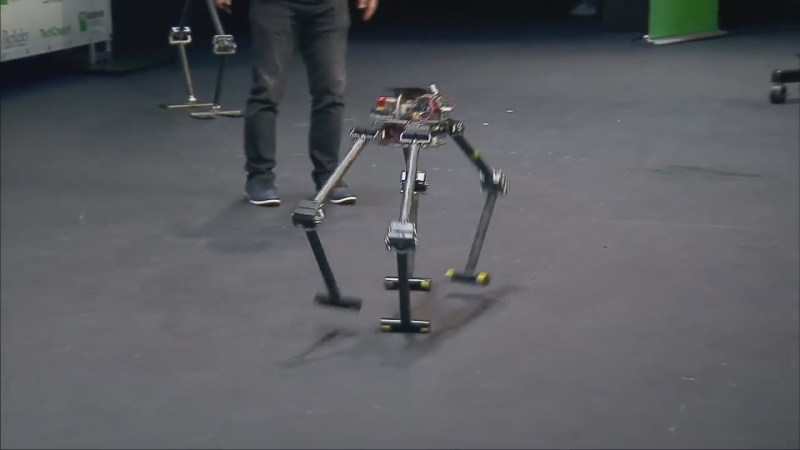
The bot is RoMeLa at UCLA’s latest evolution in their approach to traditional bipedal roadblocks. Sideways walking is something we covered when we talked about their previous version, NABi, which had only two legs. ALPHRED expands that to four limbs. As the video below shows, all four limbs can be used for walking using either a wide, stable sprawl or the limbs can reorient to a narrower dog or horse-like stance for faster running.
Beyond walking, one or two of the limbs can be put to use as hands to open a door or hand over a package, which is why they refer to them as limbs instead of legs or hands. Only an animation is shown of that configuration but RoMeLa is a robotics lab which we keep an eye on so we’ll let you know if they demonstrate it.
The video goes on to show a neat actuator with active compliance which they call BEAR, Back-drivable Electromagnetic Actuator for Robots. A search turned up no further details but let us know in the comments if you have any. We also liked seeing how they use a speaker to give a rough idea of the amount of current being drawn. While it’s both practical and a hack, it also adds a nice sci-fi touch.














Come on, at least make the body a big ball, so it can be a Walking Eye
Like that Johnny Quest episode?
http://3.bp.blogspot.com/-cYlmNaM-_ZA/USUNZ9OvUBI/AAAAAAAADWo/0F2qvqrxTy0/s1600/doom+screen09.png
The really interesting part here is the actuator. Can anyone find a paper/page on it’s design?
Looks like a servo with a little springiness, which could be used with force sensor. Just pure speculation: it could be modeled as typical servo which knows it’s position, but servo’s axle is connected by slightly flexible connection to another potentiometer on output axle, so it knows commanded and effective limb position. Because effective limb position has some give, it can be used as force sensor. Just look how it behaves when stopping.
A bit like…
https://hackaday.com/2015/12/15/feeling-force-through-a-servo/
My educated guess is that it’s a brushless type motor (or potentially a pair of brushless type motors), with a fine rotary encoder and some fancy software. The mushiness of it is something you could easily do with a stable ESC. Your idea of the force sensor is likely to be included in their implementation, as the return-force is probably scaled according to it’s rotation past requested position.
I am betting those are [dynamixels](http://www.robotis.us/dynamixel/) — not sure which one
I don’t think those dynamixels are any different from regular RC servos in terms of how they operate mechanically. That means they are not back drive-able.
you would lose that bet. https://youtu.be/poPeO7xxA90
Bipedal walking/standing is alternate dual inverted pendulum problem, aggravated with need to compensate eccentricity of off-leg while moving it (and getting help from using the arms as auxiliary counterweights). As described, that would still make for a very uncanny gait. Humans usually blend all the phases in one fluid continuous motion (after the age of 1).
Anyone find any info at all on the ALPHRED and BEAR actuator? papers? specs? any data at all?
I know a ETH? spinoff have built something similar a year or two ago: https://www.anybotics.com/anydrive/
http://www.rsl.ethz.ch/robots-media/actuators/anydrive.html
How is that BEAR-actuator revolutionary? It just seems to be a motor, gearbox and a feedback loop with tunable parameters. Still, a neat build.
I don’t think it’s a motor with gearbox. They made the point of the fact that you can push it. Can’t do that with a high-reduction gearbox.
I think it’s a servo, which is IMO the only way to fly. Add a force sensing strain gauge and you can simulate the rest in software (or FPGA).
I’ve always thought this would be a great approach for a weight-training machine. Instead of heavy weights, just dial up the simulated mass. The dynamics would be done in software, so the weight would have exactly the same feel as an actual mass.
Better have lots of fail-safes, though!!!
Electromagnet.
I like the innovative mechanisms like the knee joints that can rotate 360°. But the “feet” leave a lot to be desired. You’ll note that the robots can only go forward or backward (or sideways, which is really a matter of where you paint the face with your Sharpie). I saw not even a feeble attempt to turn, much less do an about-face. I’ll be impressed when they can make it do a pirouette.
When Igor Sikorsky demonstrated his helicopter prototype, apparently no one in the audience noticed that it did not fly in the forward direction during the demonstration (because it couldn’t).
I don’t see what this bear actuator can do that a Mechaduino couldn’t. Also, it probably takes a fair amount of power to hold position if there’s no worm or harmonic drive.
Relevant:
https://www.youtube.com/watch?v=rdOXjJjYE8g
The thing is that you never want to hold a fixed position. To get an idea how the “bear actuator” work take a look at this blog, Its an similar type of actuator build with a lot more details. http://build-its-inprogress.blogspot.com/2016/05/slow-motion-jump.html
Here is an demo of controlling the “springiness”:
https://www.youtube.com/watch?v=JnAA2EnShH8
https://www.youtube.com/watch?v=w48HnwQ_Fb8