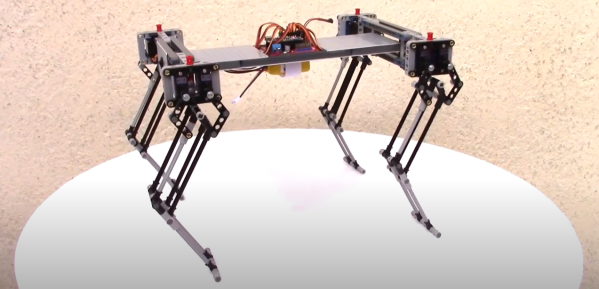
[Aaed Musa] has been building robot dogs for a long time now, so it was only natural that he would make one for the senior design project of his mechanical engineering degree. Since this meant working with potential customers, the requirements were somewhat more stringent than for previous dogs, but [Aaed] and his team were able to deliver CARA 2.0, their most agile, versatile robot yet.
Based on conversations with potential customers, [Aaed] and his team aimed for a price around $1,000 USD, a weight under 20 pounds, and a durable design. Like the original CARA, this used capstan drives to actuate the joints, which reduced costs. The drives were printed in resin and powered by brushless drone motors. These motors were designed for speed, not torque, so the team had to rewind them with more wire, an ordeal which paid off by roughly tripling the torque. As far as durability, one joint motor was tested by running it continuously back and forth, and it lasted for over 1,000 hours without obvious damage.
Since the joints don’t contain any absolute encoders, each motor has to home on startup by extending to its limit, as detected by a rise in motor current. As a happy side effect, this creates a lifelike stretching motion on startup. Compared to the earlier iteration, CARA 2.0 takes shorter, quicker steps, and thanks to angled step movements can turn much more quickly. In testing, it originally skewed to the left, which turned out to be due to an asymmetric leg design. Once corrected, CARA 2.0 could walk in straight lines, walk sideways, turn in place, crouch, jump, and keep its balance on an inclined surface. It didn’t quite make the price goal, but $1,450 is still cheap for such a capable robot dog, and it reached every other customer requirement. Most importantly, all the team graduated.
For another take on a capstan-powered robot dog, check out Stanley. We’ve also taken a look at TOPS, one of [Aaed]’s earlier designs.