While nobody is exactly sure on the exact etymology of the term, Thomas Edison mentioned some of his inventions being riddled with “bugs” in a letter he wrote all the way back to 1878. In the context of computers, any loyal Hackaday reader should know Grace Hopper’s infamous account of a moth being caught in an early electromechanical computer’s relays. To this pantheon of troublesome insects, we would humbly summit the story of a Sonoff TH16 switch being destroyed by a lowly ant.
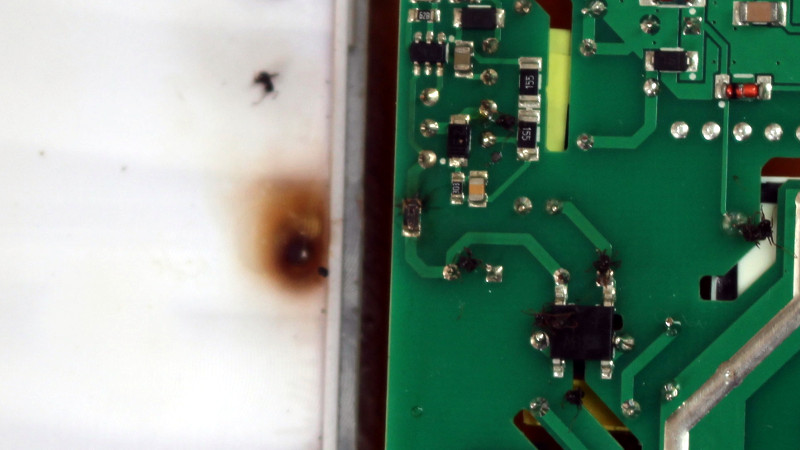
 According to [CNX Software], the Sonoff TH16 had been working perfectly for a year and a half before the first signs of trouble. One day the switch wouldn’t respond to commands, and a power cycle didn’t seem to clear the issue. Upon opening up the device to see what had gone amiss, it was clearly apparent something had burned up. But upon closer inspection, it wasn’t a fault with the design or even a shoddy component. It was the product of an overly curious ant who got a lot more than he bargained for.
According to [CNX Software], the Sonoff TH16 had been working perfectly for a year and a half before the first signs of trouble. One day the switch wouldn’t respond to commands, and a power cycle didn’t seem to clear the issue. Upon opening up the device to see what had gone amiss, it was clearly apparent something had burned up. But upon closer inspection, it wasn’t a fault with the design or even a shoddy component. It was the product of an overly curious ant who got a lot more than he bargained for.
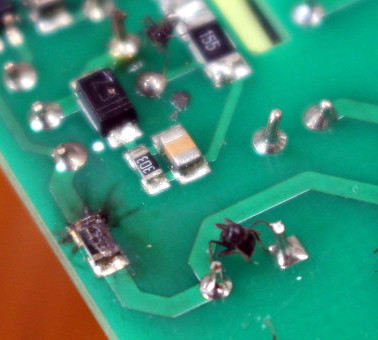
Consulting the wiring diagram of the Sonoff, it appears this poor ant had the terrible misfortune of touching the pins of a through hole capacitor on the opposite side of the board. Bridging this connection not only gave him a lethal jolt, but apparently caused enough current to surge through a nearby resistor that it went up in smoke.
Now, some might wonder (reasonably so) about the conditions in which this switch was operating. If bugs could climb into it, it’s not unreasonable to assume it wasn’t well protected from the elements. Perhaps damp conditions were to blame for the failure, and the image of the ant “riding the lighting” is nothing more than a coincidence. Maybe. But sometimes you just gotta believe.
Incidentally, if you’d like to learn more about the woman who helped secure “bugs” in the IT lexicon, here’s a good place to start.
Ed Note: If you think you’re having deja vu all over again, we did point to this story in the Sunday Links roundup, but the graphics are just so good we couldn’t resist running it in full.














something something milliants ¯\_(ツ)_/¯
This just happened to me Ugh. The sonoff made a noise and stopped working. When I disassembled it I found a dead ant across some pins
Back to the origins :)
Ah, reminds me of the time back in the day when my xbox was destroyed by a curious cricket. Little guy never saw it coming. All I saw was the little flash of light and a low pop sound.
… ahh the infamous red chirp of death …
Phase IV is starting.
What’s Phase IV? I know Phase I is collect underpant, Phase III is profit.
https://www.youtube.com/watch?v=tO5sxLapAts
That´s why industrial PCBs are heavily tropicalized with a thick coating of dielectric varnish…
Obviously consumer grade hardware skips this step to cut costs. Might be worth doing as after-market treatment, depending on ones environment.
Unless performance in truly awful environments was certain I’d personally prefer being able to easily rework a board. Making a waterproof project box isn’t super difficult. Hey, maybe once I’m done iterating a design but knowing me that’s a continuing process.
Usually a soldering iron melts right through a conformal coat, making rework absolutely possible. You just have to re-coat when you’re done.
Ants are very good at finding any crack or hole in the house in their search for food. Especially if they “have the scent”. And once they are inside, you’ll find them all over the place. It’s not impossible an ant found it’s way into a sonoff device mounted on a wall or cabinet inside of a reasonably well closed home.
I seem to recall hearing ants are attracted to electricity as well, like the opposite of how bees behave.
It´s MUCH more complex than that.
Can you imagine yourself being able to sense or eventually modulate electrostatic fields ? that´s what plants, insects, and fishes (at least) can do, with varying capabilities.
Just an example with plants and bees here:
http://www.dailymotion.com/video/xxseuo
Well, I can also sometimes sense very strong, close contact, electrostatic fields with my body hair.
And there’s also the taste and smell of ozone.
I have this amazing ability to sense a high voltage just by touching the wires and letting current to flow through me!
Aside from electronics and programming, I also perform energy work and deep trauma emotional release healing. Since I’ve been involved in that field (over the past 4 years), on a few occasions, I’ve run across a few people who are “energy sensitive” (and empathic). The individual energy sensitivity of each varies in degrees from “slightly” to “strongly”. Sometimes, the “strong” ones can actually “see” energy (via the “3rd Eye Chakra”). I have two such female friends that are “strong energy sensitives”. In experimentation with their abilities, we found that they could distinguish between masculine and feminine energy in plants. One girl I met could even detect that there was an Earth worm in a planter (I placed it there a day earlier unbeknownst to her) and on her own (not prompted) she picked up that there was another “life form” in the planter that was not the plant and EXACTLY where it was located within the planter. Very cool.
All the “energy sensitives” I’ve run across have been able to detect the energy being emitted from the tip of single-termination clear and black quartz crystal “wands” as well. I’ve even been able to wrap multiple turns of a single wire around these crystals and plug into a frequency generator (no return path). Using 20 – 30 volts to “excite” the crystals, they can transform the energy from the frequency generator and redirect/increase the energy being emitted from their tips. My energy sensitive friends can detect the increase in energy emissions from the crystal and also to some extent, the difference in frequencies. Its been a wonderful new experience exploring the “more than the physical” world. But most folks aren’t properly “equipped” to do so.
In reference to the bees, plants and energy, does this imply that insects are more evolved (in some ways) than we as human-beings?
Peace and blessings
spiders have been a pain for me, washing machine boiled my clothes, so took it apart and found a spider burned across the dial electronics, other one was a fluro lamp also spider across the circuit board…
I pot my sonoff’s with hot glue before they go into service,
Ahh, the local insect population ups the ant-y yet again…
And naturally our intrepid insect, when faced with such potential, offered very little resistance.
Sonoff a bitch, these puns are killing me. Unlike that ant, I simply don’t have the capacitance to appreciate this kind of humor.
*capacit-ants
Clearly the ant had aspirations on becoming a conductor… and got its wish!
[Redhatter],
you missed one,
resist-ants.
B^)
A co-worker once found that his air conditioner had stopped working due to a layer of crushed ants coating the main relay contacts.
Same here – twice in the same year actually. I was told by a friend who’s an engineer that ants are attracted to electricity. I spray that relay once a year to make sure I don’t have the same problem.
Ants are also attracted to dead ants. Get one in there fried (because the gap in the contact isn’t much bigger than an ant) and then all their friends come along to see what all the fun is.
Ants leave scent trails, when they find a food source, they leave a particular scent trail to aid other ants in finding the food. Then those ants also leave a scent trail, reinforcing the scent, up to the point the trail becomes a “super highway” for them.
Ant-thony instantly died while crossing the 156VDC bus…
http://www.wolftronix.com/amc325_1493_2/images/IMG_6819.jpg
That photo reminds me of the Muppet “Beaker”.
Early in my electronics repair career, I opened up a piece of equipment and found a very large horse fly laying on the circuit board. The tech, looking over my shoulder who was recently from Germany blurted out in German (which I could say but can’t write) no wonder it doesn’t work das technician ist Kaput. (the operator died)
I had a similar incident years back but with a cockroach in a active monitor speaker power supply. Little guy got fried and shorted out part of the circuit. Luckily the only thing fried was roach.
I guess you listened to too much Papa Roach?
Poor cockroach didn’t want reminding :-(
I had my desktop PC suddenly totally die once. No BIOS, nothing. Opened the case to find what appeared to be mouse poop and urine on the (horizontally-oriented) motherboard. I will never leave an empty expansion slot unblocked again!
had this too, but the computer was stored on the floor, in an industrial setting, so it kinda had it coming :( now all my computers in the same workshop have no holes and automotive airfilters glued over the fan inlets, and positive air pressure in the case.
Same thing happened to my dishwasher about 5 years ago. I posted to the arduino forum at the time. https://forum.arduino.cc/index.php?topic=148410.0
The actual pics and narrative are here https://sites.google.com/site/boschdishwasherrepair/
Working in rural Spain I regularly come across insect problems. Solar power inverters with fried geckos is a favorite. Also centipedes shorting out electronic gates. Burners in gas water heaters seem to be a favorite nesting place for both spiders and earwigs – they cause the flame to burn yellow and the heat exchanger to soot up. Strangest I had that I still can’t explain was a gas fridge/freezer that wouldn’t light. It turned out the gas pipe from the gas valve to the burner was blocked by an insect. How it got in I have no idea. The injector jet hole is about 0.2mm diameter and the pipe is connected to the gas valve. It remains a mystery to this day.
I think the cap ant is innocent as it seems to upstream the series resistor. I think the real perpetrator is the one at the 155 resistors.
Thanks, ants.
Thants
Trans Atlantic cables were attacked by sharks.
https://www.mitel.com/articles/learn-about-transatlantic-cable
I’m not convinced the ant is the reason. I rather suspect a faulty IC unresponsive to overcurrent or not switching the transistor off. Could be caused by power spike from supply.
Not a fault with the design, my ass. It needs conformal coating.
The exact explanation in the post doesn’t quite gel with the pictures.
The burned component in the photo is the inductor L1, not the resistor R3. The photos show that it’s in series with the output of the bridge rectifier.
R3 & R4 are visible as a pair of big resistors on the zoomed out photo in the post, a little further up near the isolation slot for U2. They are marked 155, ie 1.5Mohm.
The through-hole capacitor leads with the ant over them in the photo looks like C2 not C3 (upstream of L1 not downstream).
I don’t quite see where C3 (the downstream cap) is in the photos. This and some different connections around U1 imply that maybe the schematic is for an updated version of the Sonoff.
If an ant did short a downstream capacitor like C3 then this could explain L1 blowing up, as excess current would have gone through it. But if the unit was damp and full of ants then there are plenty of other ways something could have shorted downstream of L1 as well.
(I wrote this reply before I saw the post had been updated to blame R2 not R3, but I think this is still the wrong component.)
Actually I’m wrong, the connection is to the negative side of the bridge rectifier not the positive so it probably is R2.
Nothing to see here…
At a company I used to work for, we had a communications gateway/aggregator device that was often installed inside garages or on exterior walls of houses, and thus was exposed to a variety of critters you would actively deal with eliminating from a living space.
I saw many a PCB with beetles, ants, wasps, moths, lizards, etc bridging just the right pair of pins on the PCB. I figure in a great number of cases, it was a function of the critter entering the case in search of heat.
Subsequent designs incorporated conformal coating, though that wasn’t without it’s problems, and I wasn’t personally too fond of it because cleanly affixing serial and SMD JTAG headers to boards was more time consuming that it needed to be.
Come to Hawaii, I’m losing several GFCI outlets per year due to ants creating new traces on the PCB’s.
” It was the product of an overly curious ant who got a lot more than he bargained for.”.
*she