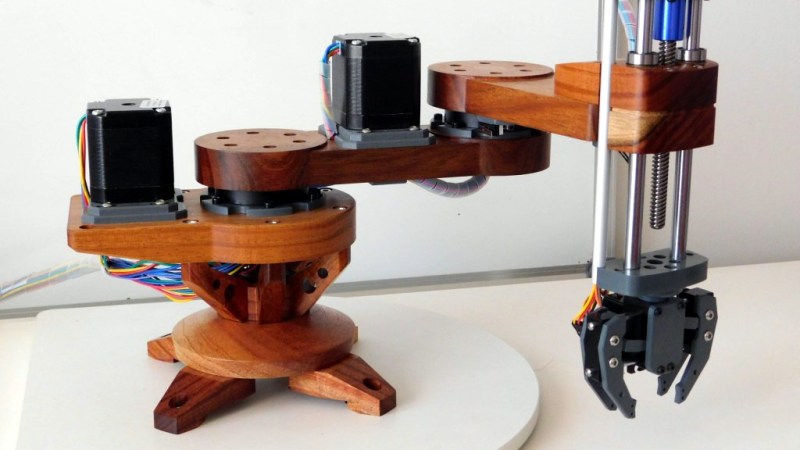
[Ignacio]’s VIRK I is a robot arm of SCARA design with a very memorable wooden body, and its new gripper allows it to do a simple pick and place demo. Designing a robot arm is a daunting task, and the fundamental mechanical design is only part of the whole. Even if the basic framework for a SCARA arm is a solved problem, the challenge of building it and the never-ending implementation details make it a long-term project.
When we first saw VIRK I in all its shining, Australian Blackwood glory, it lacked any end effector and [Ignacio] wasn’t sure of the best way to control it. Since then, [Ignacio] has experimented with Marlin and Wangsamas support for SCARA arms, and designed a gripper based around a hobby servo. It’s as beautiful to see this project moving forward as it is to see the arm moving ping-pong balls around, embedded below.














I’m calling BS on the ping pong ball theory. When I read that I thought wow, I underestimated the size of that arm, it must be huge. The article says those are nema 17 motors (43 mm across), and nema 11 (28 mm). And ping pongs balls are 40 mm. But its a nicely made project.
Oh yeah. They’re way too small for ping-pong balls. My bad. I edited that in there in post — didn’t look carefully enough.
If you look at the size of the electronic components then you’ll realize that the “ping-pong balls” are far more likely to be white marbles. I would estimate they are 1cm in diameter rather than the table tennis ball which are 4cm in diameter (as described on Wikipedia: https://en.wikipedia.org/wiki/Table_tennis#Ball ).
So, we need the drawings to be scaled up for real ping-pong balls to meet expectations :-)