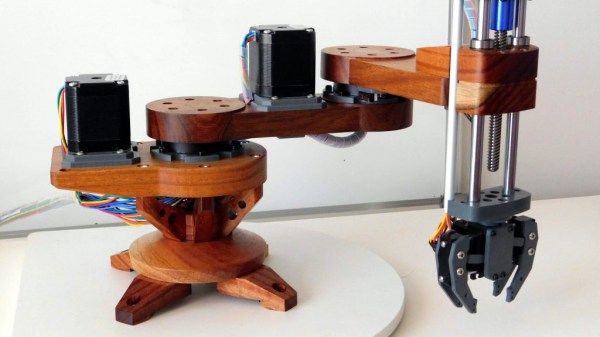
[Ignacio]’s VIRK I is a robot arm of SCARA design with a very memorable wooden body, and its new gripper allows it to do a simple pick and place demo. Designing a robot arm is a daunting task, and the fundamental mechanical design is only part of the whole. Even if the basic framework for a SCARA arm is a solved problem, the challenge of building it and the never-ending implementation details make it a long-term project.
When we first saw VIRK I in all its shining, Australian Blackwood glory, it lacked any end effector and [Ignacio] wasn’t sure of the best way to control it. Since then, [Ignacio] has experimented with Marlin and Wangsamas support for SCARA arms, and designed a gripper based around a hobby servo. It’s as beautiful to see this project moving forward as it is to see the arm moving ping-pong balls around, embedded below.









