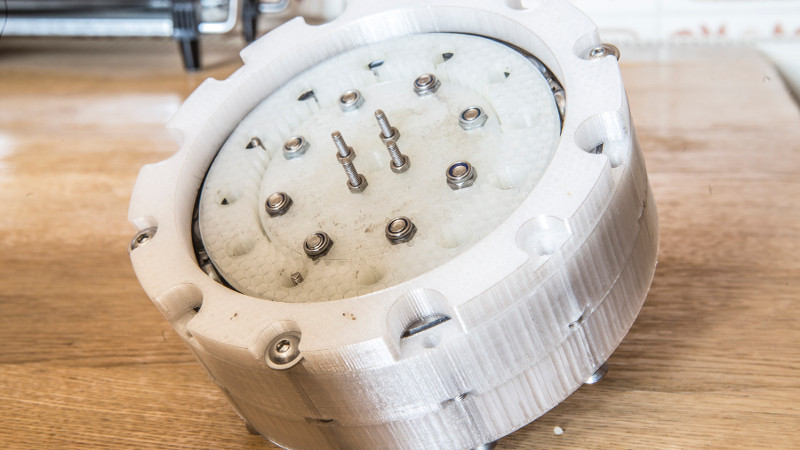
Strain wave gearing is a clever way to produce a high-efficiency, high ratio gearbox within a small space. It involves an outer fixed ring of gear teeth and an inner flexible ring of teeth which are made to mesh with the outer by means of an oval rotor distorting the ring. They aren’t cheap, so [Leo Vu] has had a go at producing some 3D-printable strain wave gearboxes that you could use in your robotic projects.
He’s created his gearbox in three ratios, 1:31, 1:21 and 1:15. It’s not the most miniature of devices at 145mm in diameter and weighing well over a kilogram, but we can still imagine plenty of exciting applications for it. We’d be curious as to how tough a 3D printed gear can be, but we’d expect you’ll be interested in it for modest-sized robots rather than Formula One cars. There’s a video featuring the gearbox which we’ve placed below the break.
This certainly isn’t the first strain wave gearset we’ve brought you, more than one 3D printed project has graced these pages. We’ve even brought you a Lego version.














Nylon filament is sensitive to humidity, but projects like this make it tempting.
BTW, could it not be liquid cooled?
I tore down a harmonic drive here:
https://www.youtube.com/watch?v=02wR0U_7SfM
Rewind it :) Steppers are not too hard to rewind. Actually probably easier than most other motors due to them being brushless. Shame the encoder wheel broke but you should be able to replace that with a magnetic version.
Looking at your winding it would appear that some of them have shorted and burnt out.
it would have to be oil cooled though, as there’s a metal ball bearing in there…also at 70% efficiency, the oil cooling is probably a necessity
If you sealed the gearbox (sealing paint on the outer surfaces and liberal application of grease on the inside), wouldn’t that stop the nylon from absorbing moisture?
Someone should injection mold the parts, and make a kickstarter out of this.
You’d need to do a fair bit of R&D on the strain-wave gear…
too rigid = lossy gearbox, too flimsy = will break/buckle under load, too abrasive = will eat the other gear and so on…
You’d need to have the right blend of plastics/filler and tune the injection molding to end up in the “just right” zone.
One of the most famous uses of the harmonic drive was in the wheels of the Apollo Lunar Rovers. Here’s an interesting article about it: https://www.bostonglobe.com/business/2019/01/13/this-company-gears-went-moon-and-they-still-going-places/VUlxXuKbIpcb68NDxFeD3O/story.html
Glad more people are taking a whack at it! To anyone interested in 3D printed harmonic drives I would also check out https://hackaday.io/project/160378-open-hd
It’s still a WIP but will be updated as soon as the next version is ready.