When thoughts turn to measuring the degree to which something bends, it’s pretty likely that strain gauges or some kind of encoders on a linkage come to mind. Things could be much simpler in the world of flex measurement, though, if [Fereshteh Shahmiri] and [Paul H. Dietz]’s capacitive multi-bend flex sensor catches on.
This is one of those ideas that seems so obvious that you don’t know why it hasn’t been tried before. The basic idea is to leverage the geometry of layered materials that slip past each other when bent. Think of the way the pages of a hardbound book feather out when you open it, and you’ll get the idea. In the case of the ShArc (“Shift Arc”) sensor, the front and back covers of the book are flexible PCBs with a series of overlapping pads. Between these PCBs are a number of plain polyimide spacer strips. All the strips of the sensor are anchored at one end, and everything is held together with an elastic sleeve. As the ShArc is bent, the positions of the electrodes on the top and bottom layers shift relative to each other, changing the capacitance across them. From the capacitance measurements and the known position of each pad, a microcontroller can easily calculate the bend radius at each point and infer the curvature of the whole strip.
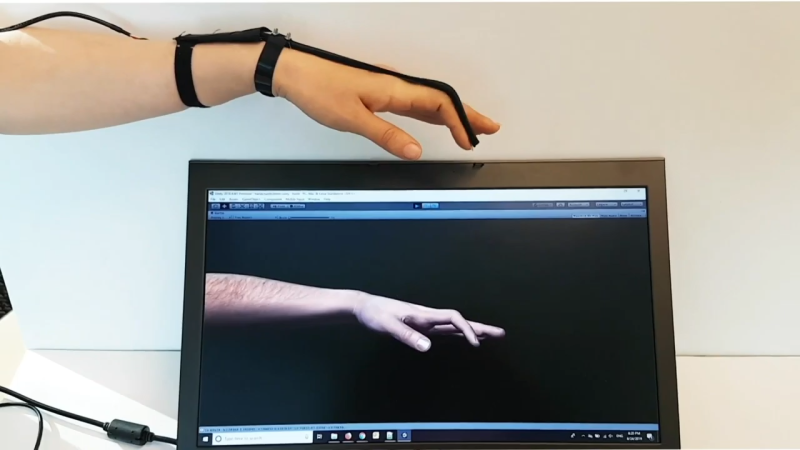
The video below shows how the ShArc works, as well as several applications for the technology. The obvious use as a flex sensor for the human hand is most impressive — it could vastly simplify [Will Cogley]’s biomimetic hand controller — but such sensors could be put to work in any system that bends. And as a bonus, it looks pretty simple to build one at home.
Thanks to [Hephaix] for the tip.














Now all you need is a memory metal strip the other side for force feedback… One small step for man, one giant leap for teledildonics.
Seems like it would be a natural fit for cable actuated joints that need dead reconing. I hope it gets picked up for production, and I hope creative people iterate on it. I would buy a 5 pack of them as parts just to have on hand.
Seems like it’s a very replicable concept. A couple flex PCBs and some polyamide strips. The genius is in the idea, the implementation or re-implementation should be pretty easy.
Already in production at BendShape.com. Reach out with your ideas for a cool project at BendShape@TactualLabs.com, and we will give you a free shape-sensing Explorer Kit.
Woops, the correct email for submissions for the Coolest Project is BendShapeIdeas@TactualLabs.com. (Sorry for the earlier typo.) Tactual will give away ten Explorer Kits. Entries can be submitted from June 27 through August 31, 2020 by emailing your Coolest Project idea to BendShapeIdeas@TactualLabs.com. The ten winners will be selected by a panel of independent judges who will pick the “coolest” project ideas, the judges decision is final. The winners will be contacted via email by September 30, 2020. Explorer Kits will be sent to the winners within 30 days of the Explorer Kit’s general availability. Each winner agrees to publicly post a video showing their Coolest Project results within 180 days of receiving their Explorer Kit. If a winning entrant fails to respond within 10 days after being notified they will be disqualified and another winner will be selected.
Can it do side to side motion of the fingers somehow? Awesome!
If you have a sixth long strip that ran all the way around the edge of the hand and each finger you could.
Yes, we can with a few clever tweaks. ;-) Reach out at BendShape@TactualLabs.com for pointers and free dev kits.
I’ve seen this basic concept before but in a rotational angle sensor that can go more than one full rotation. The variable capacitive strips are wound in a spiral with one end fixed and the other connected to the rotating shaft. This new sensor takes that concept one step further by reflecting the shape of the deformed sensor. Very nice.
How accurate were those? The calipers are uncannily accurate!
Next Step: Upgrade a powerglove?
Lol, I thought the same thing. I might still even have mine tucked away in a box somewhere, along with the power pad.
The pdf says the capacitances are sub picoFarad. What kind of interference will these encounter by being used as robotic encoders or in close proximity to each other (on a hand with possible static charge)?
Read the next page.
It gives some sources of error, but, my robotic encoder, I mean “subjected to magnetic fields” of a robotic motor. I don’t see any mention of static charge.
I guess only the creators would know this info. It would be neat if they showed an animation of more than 1 finger, or moved a powered stepper motor close to a sensor while it was animating /reconstructing the motion.
Since the capacitances involved are so small, I just wonder about real world applications. Maybe I should try putting my calipers next to a big stepper motor since the tech is similar…
The BendShape team is honored that our work was highlighted by the community! You can buy our growing range of shape-sensing dev kits on http://www.BendShape.com/shop.
This project has launched a new division of Tactual Labs to bring this to market under the name BendShape. So you will soon be able to buy these. More info is available on https://www.BendShape.com .
Bringing up a new product line in the middle of a pandemic is hard. Our growing Seattle area-based team is doing our best to get these out as soon as possible. Watch for our coming announcements!
is it possible to get just the flex PCBs?
Tactual Labs hopes to offer a range of development kits, sensors, and related components that will open up exciting new ways of measuring and manipulating shape. Watch for our product announcements…
Nice demostration using a bend sensor in a human column.
flex pcbs are expensive, however alu foil and plastic sheets are not, time to play ^_^
Another one of my project ideas that I have had on my to-do list for a couple years can now be moved to my list of ideas someone else beat me to doing. :(
It’s OK, they’ll probably license the tech to you should you ever get any crazy notions of using your idea in a commercial product :|