Behold the wondrous complexity of the human hand. Twenty-seven bones working in concert with muscles, tendons, and ligaments extending up the forearm to produce a range of motions that gave us everything from stone tools to symphonies. Our hands are what we use to interface with the physical world on a fine level, and it’s understandable that we’d want mechanical versions of ourselves to include hands that were similarly dexterous.
That’s a tall order to fill, but this biomimetic mechatronic hand is a pretty impressive step in that direction. It’s [Will Cogley]’s third-year university design project, which he summarizes in the first video below. There are two parts to this project; the mechanical hand itself and the motion-capture glove to control it, both of which we find equally fascinating. The control glove is covered with 3D-printed sensors for each joint in the hand. He uses SMD potentiometers to measure joint angles, with some difficulty due to breakage of the solder joints; perhaps he could solve that with finer wires and better strain relief.
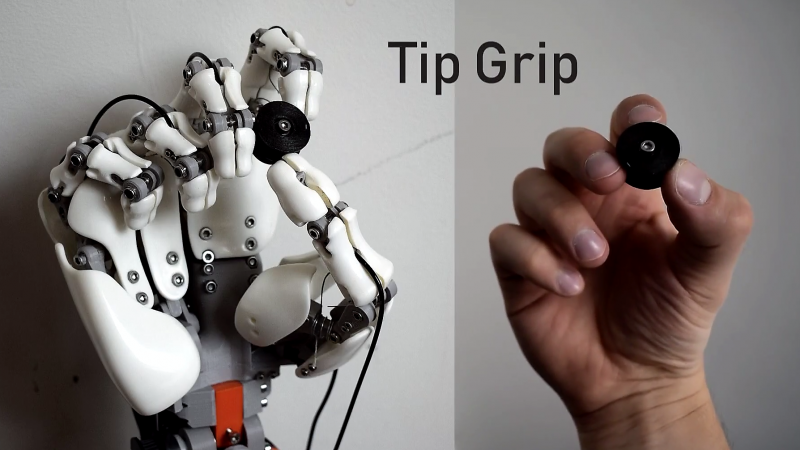
The hand that the glove controls is a marvel of design, like something on the end of a Hollywood android’s arm. Each finger joint is operated by a servo in the forearm pulling on cables; the joints are returned to the neutral position by springs. The hand is capable of multiple grip styles and responds fairly well to the control glove inputs, although there is some jitter in the sensors for some joints.
The second video below gives a much more detailed overview of the project and shows how [Will]’s design has evolved and where it’s going. Anthropomorphic hands are far from rare projects hereabouts, but we’d say this one has a lot going for it.
Thanks again, [Baldpower].













Fascinating, well done, interested in progress and augmenting critique here, thanks for post, cheers :-)
And now all the sensors needed to duplicate the human hand.
Nice Work!
“Dextrous”? It’s all part of the right-hander conspiracy!
Are you planning to do something sinister?!
Only if “Left” to his own devices …
Now you can grab a second left hand or better swap left and right.
Really impressive!