
The fastest remote-controlled airplane flight ever recorded took place in 2018, with a top speed of 545 miles/hour. That’s 877 km/h, or Mach 0.77!
What was the limiting factor, preventing the pilot-and-designer Spencer Lisenby’s plane from going any faster? The airstream over parts of the wing hitting the sound barrier, and the resulting mini sonic booms wreaking havoc on the aerodynamics. What kind of supercharged jet motor can propel a model plane faster than its wings can carry it? Absolutely none; the fastest RC planes are, surprisingly, gliders.
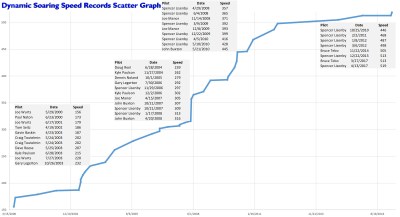
Dynamic soaring (DS) was first harnessed to propel model planes sometime in the mid 1990s. Since then, an informal international competition among pilots has pushed the state of the art further and further, and in just 20 years the top measured speed has more than tripled. But dynamic soaring is anything but new. Indeed, it’s been possible ever since there has been wind and slopes on the earth. Albatrosses, the long-distance champs of the animal kingdom, have been “DSing” forever, and we’ve known about it for a century.
DS is the highest-tech frontier in model flight, and is full of interesting physical phenomena and engineering challenges. Until now, the planes have all been piloted remotely by people, but reaching new high speeds might require the fast reaction times of onboard silicon, in addition to a new generation of aircraft designs. The “free” speed boost that gliders can get from dynamic soaring could extend the range of unmanned aerial vehicles, when the conditions are right. In short, DS is at a turning point, and things are just about to get very interesting. It’s time you got to know dynamic soaring.
The Physics of DS
When wind blows over a hill, it has to go up and over, with emphasis on the “up”. Glider pilots have used this ridge lift to their advantage for a long time, and the model airplane practice of gliding around indefinitely in the ridge lift on the front side of a hill is called “slope soaring”. With an infinite source of lift, model gliders can do all sorts of fun acrobatics using very little power, as long as they don’t hit the hill or fly up and over to the back side of the mountain.
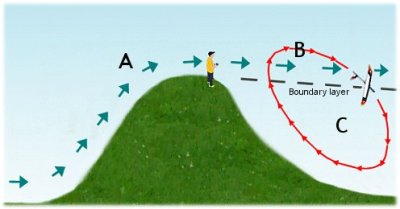 On the back side, the air pulls back down again, and there’s a strange turbulent zone between the moving air up-top, and the wind-shadow in the valley where the air is still. The back side was known to eat model airplanes, first pulling them downwards a little, then tumbling them around, and then leaving them to slowly sink in the still air. If you’re lucky, it’s a long walk down to pick up your intact plane. If you’re unlucky, you can collect your pieces off the leeward side of the hill.
On the back side, the air pulls back down again, and there’s a strange turbulent zone between the moving air up-top, and the wind-shadow in the valley where the air is still. The back side was known to eat model airplanes, first pulling them downwards a little, then tumbling them around, and then leaving them to slowly sink in the still air. If you’re lucky, it’s a long walk down to pick up your intact plane. If you’re unlucky, you can collect your pieces off the leeward side of the hill.
Until one day, when glider pilot extraordinaire (and aeronautical engineer) Joe Wurts flew up and over. He realized that he couldn’t make it back against the strong wind, and didn’t want to hike down, so he aimed the plane at the valley floor. It picked up speed, crossed the turbulent zone, and entered the still air where he was able to fly it back to the crest of the hill because he wasn’t fighting the strong headwind. When it climbed and re-entered the wind stream, he noticed that it had picked up speed. Then he started doing it on purpose.
And thus was born Dynamic Soaring with RC gliders. (Ta-daa!) It seems like a perpetual motion machine at first, but the trick is that every time the plane re-enters the fast-moving air, it gets pushed downwind. Diving down into the still air lets it fly back to where it started without receiving the equivalent push in the opposite direction. As long as the plane gets more of a push than it loses to drag during the return leg of the flight, it comes out of the circle with more energy — it’s going faster.
Insanely Fast Model Airplanes
And fast is fast. The progress in speed records stalled for a number of years due to the fact that there were no commercially available radar guns that would measure above 300 mph — supercars are slow compared to carbon-fiber RC gliders. When better radar detectors became available, largely due to continual pestering by Spencer and the DS community, measured speeds jumped up dramatically — that’s the vertical line in the middle of the graph.
 When the sport was young, the highest achievable speeds were limited by the stiffness of the wings: Flutter is the wing-killer. If an oscillation in the wing starts up at high speed, there’s a lot of energy to keep it amplifying, and the result is that the wing tears itself apart or away from the body of the plane.
When the sport was young, the highest achievable speeds were limited by the stiffness of the wings: Flutter is the wing-killer. If an oscillation in the wing starts up at high speed, there’s a lot of energy to keep it amplifying, and the result is that the wing tears itself apart or away from the body of the plane.
Modern planes have flutter-resistant airfoil designs, but are also made out of carbon fiber and other high-tech composites. Unlike “normal” gliders, DS gliders have the enviable problem of being confronted with too much wind energy, so they can be built strong without worrying so much about weight.
Today, the limits to top speed are aerodynamics and the human pilot. The air moving over the top of the wing has to cross the sound barrier, where it is no longer compressible. This creates shock waves in the middle of the wing, which kill its aerodynamic efficiency. The solution, as with full-scale planes, is to sweep the wings backwards. This smoothes out the pressure gradient along the wing, but it means an entire re-design of the plane. This is where Spencer’s next design will be going.
For a great rundown of the state of the art in dynamic soaring, you should really check out Spencer’s talk. If you just care about the planes, the history of his own designs starts around 20 minutes in.
When Spencer manages to design and build a plane that can approach the sound barrier, the next limiting factor may be the human in the loop. At speeds already in excess of 200 m/s, a human’s reaction and decision time of around 250 ms to 500 ms translates to 100 m of plane travel. If a plane hits bad turbulence at those speeds while only 20 m above the ground, it could be carbon-fiber dust before any meatbag even has a chance to blink. To quote Spencer, “With each new speed, you get this feeling like you’re in over your head and your brain can’t keep up with what’s happening.”
While we’re not quite there yet, it’s likely that the fastest DS plane in another 20 years will be significantly more automated because humans just won’t be able to keep up. This brings a slew of new challenges, from instrumentation and motors to algorithm design. There are tons of autopilot systems available out there in the broader model airplane hobby, like Ardupilot for instance, but none of them have the closed-loop response times that will be necessary for transonic DS. But they’re faster than people.
The Albatross, the Drone, and the Windmill
 Lord Rayleigh first noticed that albatrosses flew for long distances without flapping their wings. He called this “gust soaring”. But perversely, it wasn’t until after the DS revolution in model airplanes that we fully started to understand the aerodynamics fully, and we’ve still got a lot to learn from nature on this front.
Lord Rayleigh first noticed that albatrosses flew for long distances without flapping their wings. He called this “gust soaring”. But perversely, it wasn’t until after the DS revolution in model airplanes that we fully started to understand the aerodynamics fully, and we’ve still got a lot to learn from nature on this front.
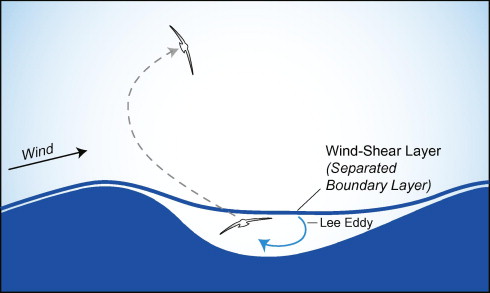
An albatross has an array of strain and windspeed sensors along the length of its wings that enable real-time analysis and control of its flight that we can’t even begin to approach. They’re reported to be able to soar in the wake of the waves even while they’re asleep, a wingtip skimming only a few centimeters over the surface of the water.
Perhaps one future application of dynamic soaring will be UAVs that save power by harvesting windspeed gradients, whether on the ocean or taking advantage of specific terrain. We’d love to hear silent DS-bots replace their noisy helicopter-based brothers. Imagine gliders that pause along their course when they approach the leeward side of a windy hill, loop around to build up speed, and then move along to the next. Combine this with thermal lift sources over the flats, or solar, and you might have something.
But before our heads get too lost in the clouds, let’s return to physics. You might be thinking “hey, with all this free energy out there, why aren’t we harvesting it already?” The “dynamic” part of dynamic soaring comes from the top turn: the plane only gains energy when it is in the fast-moving air. The bottom half of the loop is just getting back to where it started. If you didn’t need to go anywhere, you might imagine skipping the inefficient return path and doubling the energy-harvesting efficiency simply by tethering the plane to the ground with a tall mast. Let the wing spin a generator, maybe use three of them, and you’ve invented the modern windmill, which is at least twice as efficient as the best DS plane out there.
So maybe the future of dynamic soaring is exactly like the present: a fun sport that’s chock-full of adrenaline, aerodynamics, and no shortage of design challenges. Or maybe the future for you is to discover DSing at all. In another world from the high cost of competitive carbon planes, you can get started for nearly nothing with a DIY foam model or just cheese out and buy one. Beginner models are surprisingly robust, and if you wreck it, you can glue it back together or harvest the servo motors and start again. Happy soaring!














Actually energy harvesting using a tethered wing or kite does not even require the lee part of a hill/wave to fly back. It can do this by flying head into the wind being pulled by the tether costing a fraction of the energy that can be generated while flying and unwinding cross-wind.
However, doing this in the DS way would make it even more efficient. The startup company I work for, Ampyx Power, develops this (as do several dozens other startups and research groups around the world).
“It picked up speed, crossed the turbulent zone, and entered the still air where he was able to fly it back to the crest of the hill because he wasn’t fighting the strong headwind. When it climbed and re-entered the wind stream, he noticed that it had picked up speed. Then he started doing it on purpose.”
That’s… basically shock acceleration, which is responsible for extremely high-energy particle acceleration in the universe. You cross from an area with a fast moving “wind” to a slow region, turn around without much loss, and continually reencounter the fast->slow boundary, picking up ludicrous amounts of energy.
Yes, it’s not a shock wave in this case (so obviously the math isn’t the same), but conceptually it’s very similar.
This sounds right to me. (No idea about shock acceleration of high-e particles, will have to look into that.)
I don’t know what shock acceleration is, but basically, when it’s in the rising half of the loop, it uses the headwind to gain altitude, and on the falling half, it converts that into speed.
“Albatrosses, the long-distance champs of the animal kingdom, ”
[citation needed]
“They spend most of their long lives in the air. And the data that scientists have accumulated in the last two decades are truly astonishing. They roam farther than any other creature in the planet. ”
https://youtu.be/toJwBgjCZMI?t=186
Oh man, I would love to. But that is another story for another time.
Wikipedia: “Albatrosses are the most efficient travelers of all vertebrates on the planet.”
I was looking for yearly migration stats, b/c I think they put in at least 10,000 km/year, but I couldn’t find anything definitive. Don’t take that number seriously.
And then if you start getting into albatross aerodynamics…
https://www.youtube.com/watch?v=RoT2upDbdUg
https://www.youtube.com/watch?v=w-dk1NpVNNI
(Lot of overlap between these two talks, but because they’re separated in time, there’s new stuff in the latter.)
I wasn’t trying to be snarky or dismissive, I recall from my younger days about plovers migrating non-stop from Alaska to New Zealand(?) and was under the impression that they were the “long distance champs”, so before I posted my comment I did a web search (long distance bird) and found a number of birds, but neither was the plover or albatross.
Thanks for your responses!
You’d think that an animal that mostly soars would have evolved Pitot tubes to sense airspeed.
Procellariiformes (the order that includes albatrosses and petrels) used to be known as tube noses! From the Wikipedia article: “Their nostrils are enclosed in one or two tubes on their straight deeply-grooved bills” and the Albatross article says “the nostrils are analogous to the pitot tubes in modern aircraft […] in order to perform dynamic soaring.”
Huh.
Incredible!
The modern wind turbine doesn’t work this way for good reasons.
The differential below the fast and slow wind channels is only needed for flight, not for a wind turbine. The turbine extracts energy from the speed difference between the wind and the ground; the speed difference between one bit of wind and another bit of wind is small compared to this. In fact turbines are built as tall as possible and on as flat ground as possible to minimise this effect, because turbulence and wind sheer are a major factor in fatigue loading on wind turbines. A large fraction of the R&D effort in turbines is to make them as light and cheap as possible, and one way of doing this is to minimise the loading caused by the turbulence & sheer inherent in where the turbine is installed.
If you look at turbine failure (and indeed fire) statistics, turbines installed on ridges, clifftops, steep slopes etc are heavily over-represented.
That’s actually totally what I was getting at. You could double your energy take by just building a wind turbine. The whole “coasting back in the lee” thing suffers drag, is hella dangerous, and not really necessary if you’re willing to anchor the plane and just let it spin in place. :)
But the speed difference between one bit of wind and the other, in DS, is exactly the speed difference between the top of this mountain (breezy!) and behind it (still). So it’s the same wind as you’d get with a turbine poking into exactly that same air. But of course you want all of the blades out of the lee…
When I was flying RC, we measured the speed by recording the sound and measure the doppler effect.
Those gliders screams when they pass by
“Those gliders screams when they pass by”
I just imagined what would happen if that passed a little too close and hit someone. That would probably cut someone clean in half. Damn, that would not be pretty
I’ve seen some videos of DS havoc: planes disintegrating mid-air, and videos post-impact of people picking up quarter-sized pieces of carbon-fiber and foam.
You fly the circle so that nobody is in-plane with the circle, but there’s still a risk of the thing losing one wing and going wild. The competitive planes are heavy and not un-dangerous, but so far, they’ve had the worse end of the deal — I don’t believe that any people have actually gotten hurt so far.
Of course, you can do the same thing with a 200 g foamie in significantly lighter winds, and just have a good time.
With DSing it’s like flying a sound rather than a plane.
This method has its limitations in this case, because the ground speed is changing continuously and cyclically, so how do you know how much of your frequency shift is due to speed change, and how much due to Doppler effect?
Put a piezoelectric element on the leading edges that will be in contact with the supersonic air and make them resonate, add high voltage plates to generate plasma across the wing surfaces.
Not only will your plane have a smoother transition through the sound barrier but it’ll also be almost invisible to radar. Sadly it may stick out like a sore thumb to multipoint RF triangulation.
Just an ignorant question here but would swing wings help the gliders get higher speeds?
Perhaps it would, but it seems like it would be quite the engineering challenge to design the mechanism that can withstand the forces involved while maintaining the desired thin profile and high aspect ratio. To put things in perspective, the designer in the talk above has chosen to build a glider with a 3.3 meter wingspan (22.5:1 aspect ratio) using a 1-piece wing to avoid structural issues with having to join wing sections together.
He is now turning his attention to swept wing designs, though, so who knows what may come next.
Swing wings are used to allow an aircraft to perform well at both low and high speeds. In the open position, this allows for slower takeoff and landing speeds. I don’t think that low-speed performance is a big factor here, so there should be some advantage to using swept wings, which reduce drag at transonic speeds. 545 Mi/hr is 0.71 Mach, on the straight-wing plane shown in the article. Airliners can cruise at 0.8 Mach or so, largely because of their swept wings.
Now, if you wanted a supersonic glider…
While they are beautiful, and clearly fast, I have doubts based on the airfoil shape that they will achieve significantly above Mach1. A quick glance at the shapes of lifesize Mach1+ capable aircraft suggests a completely different geometry.
But we don’t know exactly is happening at model scale airfoils. Generally the testing has been inconclusive in wind tunnels. The computer sims prediction works because it uses observed data
We may not “know” what’s happening, but as you allude to, we know how model-scale wings behave, since most designs that are wind tunnel tested are tested first as scale models. Model-scale wings at low Mach numbers have an advantage over human-transport-scale wings, in that they have shorter chords, allowing them to go faster before turbulence begins. I don’t think this advantage extends to transonic speeds, due to compressibility, which occurs when you approach the speed of sound independent of the dimensions of the wing, so there they probably behave pretty much like larger wings. I wouldn’t say that supersonic dynamic soaring is not possible, but DS works only where you can gain more potential energy while flying into the wind than you lose to drag through the whole loop. I’m just saying you’d have to be in pretty high wind for this to work, and that would further exacerbate the structural challenges.
Have you heard of anyone trying this with any of the Kline-Fogleman Airfoil design variants? Also, I just happen to live in the Soaring Capital of the USA in Big Flats NY at Harris Hill. Gliders in the air all day every day the weather allows. Occasionally we get hang-gliders and paragliders!
KF airfoils are great for quick-and-dirty builds when you have excess power, like you do with most models these days.
But they give up too much in drag/lift for gliders in general, and that goes double for DS planes where the glide efficiency on the return leg of the loop is one of the first limiting factors.
There’s a long thread on RCGroups somewhere about replacing the glider-designed wing on an ELF with a KF wing, and that experiment confirms this in practice.
“Computer sims”… I dunno. Xfoil (https://web.mit.edu/drela/Public/web/xfoil/) is pretty good, and was designed specifically for slower, smaller model flight — specifically gliders. It is a straight physics sim, though, so it only tells you what the math does, and it does a very good job.
It may not be suited for nearing-supersonic, though. I dunno. But I do know that Spencer Lisenby has gotten help from Xfoil’s author on his project, and maybe some of that made it back into the mainstream version?
This, by the way, would be very, very wrong. A sonic boom up close every couple of seconds would become unbearable pretty quickly. Either that, or it would be awesome.
No, a sonic boom every few seconds would not be awesome, see the reference below.
https://en.wikipedia.org/wiki/Republic_XF-84H_Thunderscreech#Noise
LOL! Yeah.
And by the way, although the propeller tips were supersonic, the highest speed ever recorded was 520 Mi/h, so the plane described in the article is faster than the XF-84.
That is absolutely insane. I would love to try it, but I’m certain I’d lose it after one loop. I wonder how many Gs it pulls on ascent.
Yeah! I wanted to work that out for the story, but couldn’t find an estimate of circle diameter.
But wait a sec, he was saying ~2 sec for a loop at ~200 m/s. So a 400 m loop. = 64 m radius.
v^2/r = 625 m/s^s = 64 g.
And that’s assuming it’s a circle — if it’s an ellipse, it’s gotta turn tighter, and it’s going to be more.
Holy cow.
Holy mutant ninja cows. That’s a lot of g.
From the video, they put a sensor onboard. It registered the limit of 120g.
Would love to see the wing deflection under that G load in slo-mo… Just how stiff are they, and how close to ripping off the fuselage. At least unlike powered RC there doesn’t need to be a massive weight in battery and motor.
Holy cow.
Wow! It’s one thing to read that the plane is going fast in a loop. It’s another thing to see it!
I’ve always marveled at the notion that sailboats can travel faster than the wind. I guess this is similar.
LOL! All I can see in the video is the camera moving back and forth, and an OCCASIONAL frame where the plane is flying directly toward or away from the camera. This is insane.
Tough on the old video compression algorithms! :)
We used to drag a 1″ thick sheet of plywood up on the mountain and hide behind it while recording when the speeds were only in the 200’s. Until a wing spar snapped and the fuse had to be dug out of the ground from implanting a foot into the hillside. There’s lots of lead in those planes so the forces on the structure at those speeds are incredible.
545 Mi/hr is 799 ft/s. That’s about the same as the muzzle velocity for a .38 special handgun.
Speaking of ArduPilot. Here’s a flight demonstrating the autonomous soaring. No motor used after the initial takeoff and it’s a single rectangle mission on repeat with a flexible upwards altitude. Autonomous DSing is probably not that far away… Pull request welcome!
https://ayvri.com/scene/gdkz1q8o5z/ckar4mvok00023g69n61jpc9m
That’s awesome.
It looks like it’s detecting better-than-average lift, circling around in it until it peters out, and then moving on to the next waypoint. That should be an “easy” algo to work out if you have generally favorable conditions. (Where “easy” means hard when you look closely enough at all the details, or if you don’t have good lift.)
I think rctestflight on youtube did some experiments with sloping and Ardupilot, and discovered experimentally that it doesn’t have any provision for altitude-keeping when the plane is in lift — it would turn the motor on when it sinks, but never dove when it got higher than the waypoints.
Gliding / thermals / sloping is an awesome, not-yet explored, but fully-ripe area in drone piloting, IMO. I expect the next couple years to be exciting.
The rctestflight video didn’t even use the soaring feature. Most of his videos lack understanding of what the autopilot is capable of.
https://ardupilot.org/plane/_images/thermalling.jpg
Here’s info about ArduPilot soaring
https://ardupilot.org/plane/docs/soaring.html
Thanks! Is anyone using these? I’d love to dig into it — there might even be an article in there.
Here’s a blog post
https://discuss.ardupilot.org/t/continuous-12-hour-solar-and-soaring-flight-with-ardupilot/60235
There’s several threads in the discuss forums :
https://discuss.ardupilot.org/search?q=soaring
Just as of this week a new dedicated flight mode “Soaring” has been added so the function no longer temporarily hijacks the LOITER mode.
I see that it always circles to the right, which suggests that you’re right about the algorithm. Human pilots detect not only sudden lift, but also which wing is lifting more, and then they turn in the direction of the wing that lifted, since it’s most likely that the center of the thermal is in that direction.
DS is dangerous! If you get hit by a model glider going even one hundred miles an hour, there’s a good chance you’ll be DOA. A 15 pound carbon fiber glider hitting you at 500 mph would probably cut you in half like a knife through soft butter. In slope DS, the glider can be flying right at you over and over again. One glitch on the controls at the wrong moment (whether human induced or not) and/or a structural failure, and you’re done for if any part of the glider hits you. IMO these model DS pilots should be standing behind clear acrylic bullet-proof barriers.
To get some Idea of what I am talking about, watch this video of a DS flight, and that’s a fairly timid run:
Valenta Destiny dune DS
https://www.youtube.com/watch?v=86c5Wu_DwsU
https://www.youtube.com/watch?v=86c5Wu_DwsU
Beautiful flying! But agreed about the danger factor with the heavier birds.
You might want to be behind something or be sure that the plane flies circles that are out-of-plane with people. Or both. :)
It’s like watching racecars up close.
>I’ve always marveled at the notion that sailboats can travel faster than the wind. I guess this is similar.
Pythagorean theorem explains that one. You can move faster than the wind, by moving at an angle to it.
I think the sentence “The air moving over the top of the wing has to cross the sound barrier, where it is no longer compressible” should end with “incompressible”, not “compressible”.
Aeroplanes do not perform acrobatics they perform aerobatics………..acrobats acrobatics……….aeroplanes aerobatics
If it’s pedantry you want, two or more can play THAT game. “Aerobatics” is just a shortening of “aerial acrobatics”, so aerobatics IS acrobatics. In fact, I could argue that “aerobatic airplane” is redundant.
Hmm, has anyone tried this with powered models / non-glider designs?
The claimed record of 545 mph is actually false. The aircraft was lost during the flight due to stab failure. In other words, the aircraft did not complete the flight. That being the case, spencer claimed a record speed nonetheless. This claim was whitewashed furthermore with an edited YouTube video showing a landing from another flight. This false claim is very well known within the Dynamic Soaring community. As for design; aside from that known as the ‘Transonic’, spencer did not design any of the airframes in the ‘Kinetic’ family. Each were commissioned pieces.
steven,
I am unaware of any information that corroborates your claim that the aircraft was lost during the flight after the record speed was achieved, prior to a successful landing.
I did find the video that has the record laps, with a landing at the end of the video ( https://www.youtube.com/watch?v=MoaWlKC3wIM ). What I saw was a Transonic being launched, then showing the Transonic being flown in DS orbits, including the record breaking orbit along with quite a few other radar readings above 500 mph, then showing a landing with a Transonic that has the same color scheme as what was shown on the launch. There is also a still photo on RCG that shows Spencer holding a Transonic with the same color scheme as the one in the launch and landing portions of the video, while he was holding the radar gun that shows the maximum speed of 545 mph.
On a separate note, the DS “world record” is an unofficial thing, with crowd sourced rules. There are quite a few sub-categories such as site specific records, airframe design records, etc. I am unaware of any consensus in regards to the DS WR rules stating that the aircraft has to successfully complete an undamaged landing in order for the record to be valid.
This is not the first time that you, steven seims, have made inappropriate and disparaging remarks in regards to successful DS pilots and designers. From what I have read, Spencer has been quite forthcoming in regards to the various people that have put forth effort in regards to the aircraft that he has led the development of, such as the Kinetic and Transonic.
Your baseless claims and disparaging remarks do not place you in a positive light.