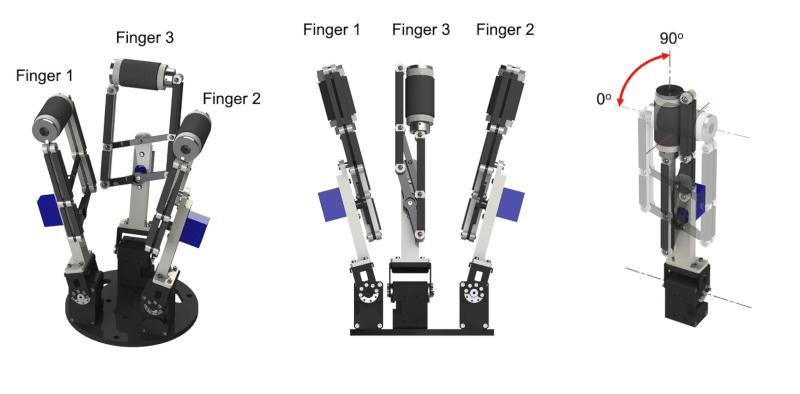
In a recent International Conference on Robotics and Automation paper, [Shenli Yaun] and some others from Stanford discuss the design of a roller-based robot hand that has many features that mimic the human hand. The key feature is that each of the three fingers has a roller with a small geared motor.
The rollers allowed the hand to change an object’s orientation without losing its grasp. Of course, this works well with spherical objects like a ball. But the video shows that it can manipulate other items like a 6-sided die, a water bottle, or even a piece of paper. By spreading the fingers it can even hold large objects you wouldn’t expect at first glance.
There are certain limitations such as slipping for some shapes and the paper covers those. This seems to be one of those things that will be very useful for certain applications, but perhaps not universally applicable.
The team is already working on version two which has small balls instead of rollers. We look forward to hearing more about it in the future.
We’ve seen soft gripping robot fingers before. Gripping is one of those things that is easy for even a child to do, but much harder for a robot.














Looks like this would be the perfect manipulator if you were to build the Tachikomas from Ghost in the Shell. Not only could it grab and manipulate, but twist one of the fingers to roll and a robot could drive along on these.
“The rollers allowed the hand to change an object’s orientation without losing its grasp. Of course, this works well with spherical objects like a ball.”
For our robotic athletes.
And sexbots.