
Master of 3D printed robots, [James Bruton], plans to do some autonomous rover projects in the future, but first, he needed a modular rover platform. Everything is cooler with tank tracks, so he built a rover with flexible interlocking track sections.
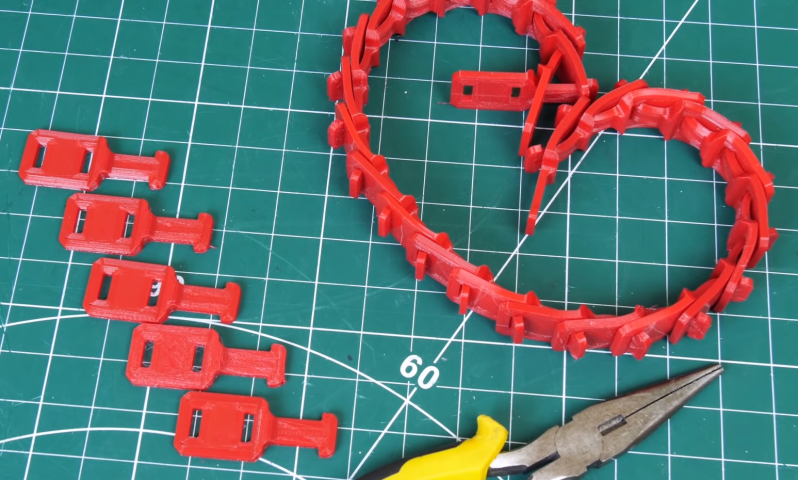
The track sections are printed with flexible Ninjaflex filament. Each section has a tab designed to slot through two neighboring pieces. The ends of the tabs stick through on the inside of the track fit into slots on the drive wheel like gear teeth. This prevents the track from slipping under load. The Ninjaflex is almost too flexible, allowing the tracks to stretch and almost climb off the wheels, so [James] plans to experiment with some other materials in the future. The chassis consists of two 2020 T-slot extrusions, which allows convenient mounting of the wheel bogies and other components.
For initial driving tests [James] fitted two completely overpowered 1500 W brushless motors that he had on hand, which he plans to replace with smaller geared DC motors at a later stage.
A standard RC system is used for control, but it does not offer a simple way to control a skid steer vehicle. To solve this, [James] added an Arduino between the RC receiver and the motor ESC. It converts the PWM throttle and turn signal from the transmitter, and combines is into differential PWM outputs for the two ESCs.
We look forward to seeing what [James] does with the rover. It seems like the perfect platform for the new Nvidia Jetson Nano 2GB. A while back [rctestflight] built also built an interesting tracker 3D printed rover, which can run autonomously with Ardurover, and sometimes lives out at his flying field.













James reinvented the link belt. Can pick those up at Harbor Freight. Item 43771. Also look up Accu-Link, Fenner Power Twist, BDH DuroDrive, Jason Industrial and others.
– Nice, I had never come across these! – Thanks!
And the links in a link belt are probably significantly less flexible than Ninjaflex. Might be worth printing the links in PLA or PETG.
Which he mentions 20 seconds into the video…
Looks like fun and all, but I wonder how long such a home made belt would last.
An alternative which I’ve never seen used before would be to use a timing belt.
There are all kinds of timing belts for “special purposes”.
One of the versions has teeth on both the inside and outside so it can drive pulleys both clockwise and counterclockwise from the same belt. Other versions have soft rubber outsides for more grip, have holes for bolting things to or have lips or ribs for grabbing stuff.
Belts like these are used for conveyor applications in industrial processes and will last a long time.
Below a simple search, and a random aliexpress shop that shows some pictures of belts like these.
https://html.duckduckgo.com/html?q=aliexpress+double+sided+timing+belt
https://gzfudie.aliexpress.com/store/group/Special-processing-belt/2949054_511129305.html
Many RC transmitters can do skid-steering onboard. You need one with a “Vee tail mixer”.
This was the approach used by most of the Robotwars teams last century.
Though if we had had Arduinos then, we would probably have used them.
Most modern RC Transmitters can mix channels. Mixing throttle and rudder on two receiver channels can give you differential thrust on an airplane with twin motors. Or skid steer on a tank drive.
I scrobbled through the video as I was wondering about that. He’s got a Flysky transmitter designed for cars. No mixer to play with there.
If you look at tanks or anything with tank treads, they tend to have runner wheels in between the two main wheels pushing down on the treads to keep tension and improve traction as well as climbing ability, this design would work better with some.
They are called bogey wheels.
Bogies are there to help distribute the enormous weight of the tank over a large area, supplying traction (as a product of downward force and tension in the track) and distributing load. This is the real advantage of tracked vehicles at the end of the day, and why you see the same arrangement on heavy ag equipment used on very soft soil.
If you aren’t worried about all this, you can get away with simply doing what’s been done here, though it’s really just a continuous tire strung between two wheels/points of contact. Sure looks cool though.
I LUV tracked devices!