When mentioning drones, most people automatically think of fixed-wing designs like the military Reaper UAV or of small quadcopters. However, thanks in large part to modern electronics, motors, and open-source control systems, it is possible to build them in a variety of shapes and sizes. [Benjamin Prescher] is working on the second version of his single rotor Ball-Drone, which uses four servo-actuated fins for control.

The first version of the ball drone flew but was barely controllable and had a tendency to tip over. After a bit of research, he found that he had fallen victim to the drone pendulum fallacy by mounting the heavy components below the propeller and control fins. Initially, he also used conventional fin control that caused the servos to jitter due to high torque loading. By changing to grid fins, the actuation torque was reduced, eliminating the servo jitter.
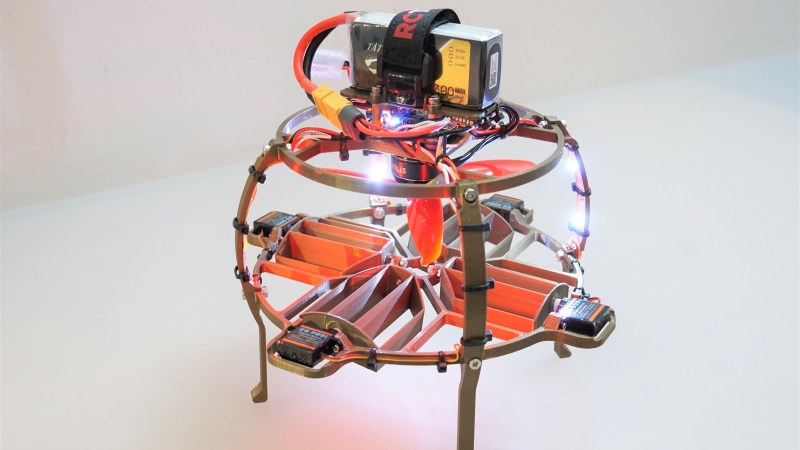
Mk2 corrected the pendulum problem by moving most of the components to the top of the drone. The 3D printed frame (available on Thingiverse) was also dramatically changed and simplified to reduce weight. Although [Benjamin] designed a custom flight controller with custom control software, the latest parts list contains an off-the-shelf flight controller. He mentions that he had started working with Betaflight. The most complex part of a drone is not the mechanics or even the electronics, but the control software. Thanks to open source projects like Betaflight and Ardupilot, you don’t need to write control software from scratch to get something in the air.
The ball drone seems well suited to an indoor environment, but we’re not sure if it has any real advantages over a quadcopter with ducted propellers. Servos are cheaper than motors and ESCs, so there might be a small cost saving. Drop your thoughts on the advantages/disadvantages in the comments below.
It is not the first single-rotor drone we’ve covered, and we’re always on the lookout for weird drones and control schemes. [Tom Stanton]’s helicopter drone with a virtual swashplate was a recent example of this that’s worth a look if you missed it.














> The ball drone seems well suited to an indoor environment, but we’re not sure if it has any real advantages over a quadcopter with ducted propellers
A single large propeller is usually much more efficient than a lot of small ones.
Not when you have a bunch of servo’s fighting the force of that prop to direct the air
i usually count motors, including those in the servos. so this is technically a 5 motor drone, same number you need for a traditional rc heli. i think cyclic control is a lot more efficient than having extra drag at the vectoring fins.
I get what you’re saying, but you just can’t count a highly geared, tiny coreless motor and a high amp direct drive brushless lift motor equivalently. A typical full size servo draws in the ballpark of 2 to 3 peak amps. A small direct drive brushless lift motor can easily pull 6 to 8 amps continuous.
I’m not saying you guys are wrong and 4 direct drive motors isn’t more efficient, but it would need far more evidence than simply saying that this setup has 5 motors vs. 4.
Cyclic control is probably more efficient, but having a tail rotor is inefficient, which one wins is not obvious to me.
Is that based on evidence or inference? I’m genuinely curious. To me, it would seem like those fins would have to impart an enormous amount of drag to overcome the excess power usage of 3 additional motors/escs. You do have the power usage of the 4 servos, but they are drastically less than a lift-motor. It’s been a while, but I seem to recall the quads I built to use 10+ amps in hover.
Its a how long is a piece of string type argument – are you comparing by volume/weight/battery capacity with the same flight path etc.
Bigger props are usually significantly more efficient (the way lift scales with area and effective speed -larger rotor faster tips? really does matter), so just maintaining a hover – where the servo’s won’t have to work that hard and aren’t creating huge amounts of drag this should work out much much better.
It probably also rotates more efficiently around the yaw axis..
But a normal multirotor is almost certainly going to be better in pitch and roll.
And I suspect the more aggressive flying will bring the normal multi-rotor type setups to being best, as extreme deflection in those control surfaces will be very draggy where other than in yaw a multirotor can change its orientation rather efficiently and very rapidly.
The wattage those little servos are pulling is far less than any propeller spun up. This isn’t a bad idea at all.
should be great to build, just for the fun of it
I think the design of the fins could improve, but there is one fact, one propeller is more efficient than four, it’s one of the reasons of the short flight times of quadcopters.
I like it. It’s shiny. I want one!
Genuinely interested: Why not built a helicopter in that case? It’s a proven technology after all.
not when you lose the tail.
What happens when a quadrocopter looses a motor? Or this thing looses control of one of the servos? Wouldn’t that equally de-stabilise it?
as its got 4 servo’s its actually got enough redundacy it should be able to fly with one missing, just being sluggish perhaps to the point of unstable in whichever direction that missing servo worked.
Same with multirotors if the flight controller or pilot is good enough its possible to compensate for damage as long as you have enough motors left for control (how many that is.. rather variable) – the helicopter on the other hand looses its tail and becomes a hopefully slow motion crash – as the rotors will slow the fall but you certainly can’t fly..
As to why not build a helicopter I’d say its because building a swash plate is actually really quite challenging… Just throwing control surfaces and servos at the problem is much easier.
Why four servos instead of 3?
Why not 2?
2 would be possible but very tricky – trying to control yaw without also pitching or rolling on just 2 is not really possible, but with fast enough control surfaces and using the main rotor as a gyro too it should be possible.
the most efficient propeller has 1 blade, somewhat less efficient but more practical is 2 blades. after that you’re just trading size for power and taking a big hit on efficiency. Boing being, I want to see a single rotor drone with a single blade. :D
How about 2 ea 1blade props contra-rotating?
“I want to see a single rotor drone with a single blade.”
I remember seeing something like that on HaD. It was a university project if I recall and lots of math went into making it happen.
https://hackaday.com/2016/05/04/your-quadcopter-has-three-propellers-too-many/
or
https://hackaday.com/2019/11/02/these-maple-pod-inspired-drones-silently-carry-payloads/ ?
(OMG, I forgot how much I love that first one! Watching him have to frisbee-launch it to get it initially spinning…)
Some ducting might improve the thrust of the rotor and flight characteristics.
Single copters have been around for years, one of mine from 2011 https://youtu.be/o0-Oahs5ulo
Still have all your fingers?
Looks like a Star Wars Training remote.
I wonder if the whole assembly could be incorporated into a VTOL winged design (a la F35-B)…
That has already been done (possibly many times).
See e.g. https://www.youtube.com/c/JoelMelanieVlashof/videos
Why are there 4 grid-fins, isn’t 3 enough? Also how much of the sides could be shrouded?
A similar foldable version is available in thingverse: https://www.thingiverse.com/thing:2058925
Will someone please take one of these single rotor or two stacked contra-rotaring rotor designs and make a real version of that triangular drone from the beginning of the Tom Selleck movie “Runaway”?
I think the flying “toy” in “Real Genius” beat it by 35 years…
Real Genius link for the scene referencing last post and video demonstration: https://youtu.be/wfbqJpn8fN8?t=70
Seen that before indeed, around 2012 I think: https://www.youtube.com/watch?v=55d5ppwQBQ4
2011 in fact, right here on HAD: https://hackaday.com/2011/06/10/spherical-military-drone-coming-to-a-sky-near-you/