Even a decade later, homebrew 3D printing still doesn’t stop when it comes to mechanical improvements. These last few months have been especially kind to lightweight direct-drive extruders, and [lorinczroby’s] Orbiter Extruder might just set a paradigm for a new kind of direct drive extruder that’s especially lightweight.
Weighing in at a mere 140 grams, this setup features a 7.5:1 gear reduction that’s capable of pushing filament at speeds up to 200 mm/sec. What’s more, the gear reduction style and Nema 14 motor end up giving it an overall package size that’s smaller than any Nema 17 based extruder. And the resulting prints on the project’s Thingiverse page are clean enough to speak for themselves. Finally, the project is released as open source under a Creative Commons Non-Commercial Share-Alike license for all that (license-respecting!) mischief you’d like to add to it.
This little extruder has only been around since March, but it seems to be getting a good amount of love from a few 3D printer communities. The Voron community has recently reimagined it as the Galileo. Meanwhile, folks with E3D Toolchangers have been also experimenting with an independent Orbiter-based tool head. And the Annex-Engineering crew has just finished a few new extruder designs like the Sherpa and Sherpa-Mini, successors to the Ascender, all of which derive from a Nema 14 motor like the one in the Orbiter. Admittedly, with some similarity between the Annex and Orbiter designs, it’s hard to say who inspired who. Nevertheless, the result may be that we’re getting an early peek into what modern extruders are starting to shape into: smaller steppers and more compact gear reduction for an overall lighter package.
Possibly just as interesting as the design itself is [lorinczroby’s] means of sharing it. The license terms are such you can faithfully replicate the design for yourself, provided that you don’t profit off of it, as well as remix it, provided that you share your remix with the same license. But [lorinczroby] also negotiated an agreement with the AliExpress vendor Blurolls Store where Blurolls sells manufactured versions of the design with some proceeds going back to [lorinczroby].
This is a clever way of sharing a nifty piece of open source hardware. With this sharing model, users don’t need to fuss with fabricating mechanically complex parts themselves; they can just buy them. And buying them acts as a tip to the designer for their hard design work. On top of that, the design is still open, subject to remixing as long as remixers respect the license terms. In a world where mechanical designers in industry might worry about having their IP cloned, this sharing model is a nice alternative way for others to both consume and build off of the original designer’s work while sending a tip back their way.














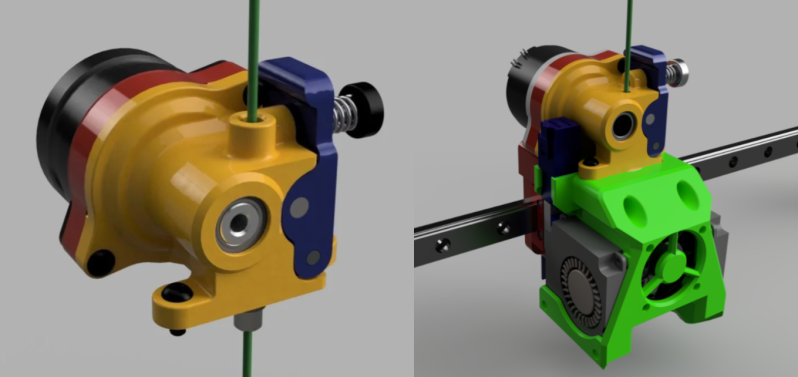
It looks like a nice, compact design.
In the video, the slicer may have been told to print at 200 mm/sec, but the acceleration is too low for it to get close to that speed with such a small print. It doesn’t look like it gets to more that about 50 mm/sec, even in the larger print at the end of the video.
This is what 200 mm/sec looks like with acceleration set to 10k, jerk speed at 30 mm/sec: https://vimeo.com/281063600
I would argue that the smooth motion of the larger object just makes it look going slower. Approximating by the bore holes on the MGN12(?) rails (25mm spaced, ~5 holes) and the steady sound after cornering I would estimate it reaches 200mm/s quites fast and also most of the time. And the feedback of the Duet interface is also showing real-speed feedback not only set-speed.
It just does not rattle like crazy as for the smaller object with more features as in your video. ;)
My video at 300mm/s with 10k accel was done using the Galileo Extruder (adapted Orbiter for Voron). First layer is only 120mm/s, and it’s printing ABS.
https://youtu.be/o6uNQ83_gok
My video at 300mm/s with 10k accel was done using the Galileo Extruder (adapted Orbiter for Voron). First layer is only 120mm/s, and it’s printing ABS.
Search YouTube for “Voron 2.4 Gantry Printing V6 Cube @ 150% scale | 300mm/s | 10k Accel | 8 Square Corner Velocity” as they won’t let me post a link here…
I am wondering if this gets the weight down low enough to consider it for a delta style printer instead of having to use a Bowden. The biggest problem I have with my delta (Rostock max) is the extruder. Most of the time it is fine, but almost every failed print I have had past my first few weeks learning has been an extruder issue. I would think that with the direct drive extruder running only 144 g, it would not add substantially to the mass of the end effector and would not likely cause many print issues.
You might want to look at a remote direct drive extruder — the zesty for example is 27grams! And there are others.
Build a flying extruder. It works well but can be further inproved by using using a pancake motor (a short nema17) on a 3:1 extruder (like a titan or bmg) and improved evenmore by using a counterweight on the outside of the machine with a rope and two pulleys.
Working on that. Will upload an adapter for Duet effector soon, at the moment is in testing phase.
Where will you post an update about the duet effector adapter? Thanks
https://www.thingiverse.com/thing:4648938
How about an adapter for a flex drive shaft to replace the pancake motor?
Is not that simple. The flexible shaft is not very good in taking torsional torque in case of extruder designs. I know they are very stiff but still just a little twistiness will make artefacts on the prints. To avoid this you need to reduce torsional torque and increase speed of the flexydrive. Thus you need about 20-30:1 gearing ratio to get some acceptable results. But this requires the stepper to accelerate beyond its capability so you will print actually slower because the remote stepper cannot keep up with acceleration. Anyway in this planetary design the ratio is 7.5:1 which is to low for remote setup.
Could someone who knows these things better than I do comment on how a copyright license can possibly apply to a wholely technical design?
I get how it applies to those specific files but it doesn’t seem like it would do what I’m guessing the people publishing with it assume it does.
Yeah, it could be redesigned with the same idea but not taking directly from the published drawings and files. And then you’d have to be able to prove that, i.e. clean room redesign.
It’s not likely he has funds to sue anyway, and I’d expect AliExpress to be full of clones pretty soon.
Copyright applies to the files, but not the design itself, and even then the files lean more towards being instructions or descriptions rather than creative works, which weakens a copyright claim a lot. You can recreate this design exactly or remix it to your heart’s content without infringing on copyright, as long as you don’t sell their files.
I’ve been looking at the Pitan extruder. I want to design a different idler lever or maybe even re-implement the whole thing in OpenSCAD to make certain features configurable.
But I’m not sure if it’s too close a copy of the E3D Titan. I know E3D releases their new stuff GPL but I haven’t seen anything about the Titan being GPL and I’d rather not get involved if it’s too close a copy either legally or morally.
This design looked pretty interesting to me until I saw it was non-com. I don’t want to sell anything but I also don’t want to spend time on a project that has limited potential due to licensing.
Oh. Nevermind, just saw the license on the Pitan. No derivatives? Really? For such an obvious copy of a commercial product?
This must be how open source dies.
Pretty much a clone of the voron clockwork eh?
Actually, the clockwork is an adapted version of Robert Lorincz’s design made into a drop-in module. Ask me how I know…
How do you know?
I’m the one that adapted it (and the link for Galileo goes to my Github, which is unfortunately about 6 months behind on updates).
Lol, I know, but you said “ask me how I know” so I did! :)
Pretty cool :) Tried something similar “back in the days” with 28BYJ-48 Motors
https://reprap.org/forum/read.php?336,616411,617260
Were the byj fast enough ? Still use it? What were the disadvantages?
This is 70g more than competitor’s remote extruder! No news here.
Except this is a direct-drive setup, not a remote with a bowden tube setup
I believe remote means the motor tork is transmitted via cable to the head, where the gears/teeth push the fillament. Remote is not Bowden. I am not sure of the backlash/flexibility of the cable. So not sure where it fits, but I suspect somewhere between direct drive and bowden. What is important is how well Klipper will compensate hardware inertia…
Thanks for the nice words :) Really appreciate it. Wait for the Orbiter V2.
Thanks for making it! Could you share some details about v2? im about to order a few of current version and don’t know if it’s worth waiting.
Thanks again!
The V2 is under development, I expect the first engineering samples soon. There are many differences, but the main importance is that we will have a much shorter custom made geared hubs this will allow shorter dimensions and of course save some weight. Working also on a new motor with improved performance in the extrusion speed range. Hopefully it will be out in a few months. Nevertheless the Orbiter V1 works pretty well you won’t be disappointed.
thanks for reply. where do you plan to post progress updates? thingiverse?
Yes most probably It will be posted on my thingiverse page, maybe I start earlier with some teasers so people can better understand what’s coming up.
Is it direct drive or 7.5:1? Direct drive meant the motor turns the filament gear directly. You cant hava gear ratio in direct drive
Direct drive in this instance means it isn’t a bowden setup.
Although to be correct would be calling it a direct geared drive.
Sherpa, Sherpa Mini, and Ascender family extruders are both still being developed and improved. Neither Sherpa nor Sherpa Mini are successors to the Ascender extruder (though there is one in the making).
Interesting that blurolls is sending out some proceeds to the creator, that’s really cool.
The sherpa mini iirc weights only 115g. And can easily push 30mm3/s. And if im informd corectly then the Sherpa and acender from Annex the one that made the LDO motor in the first place, and VD then adding to that. just my 2c.
My development was not related to Annex Sherpa mini, I actually found out about them from this article. The first motor version I used was an existing motor from Wantai motors. a round 36mm stepper with 20mm stepper back in the end of 2019. After the design was taken over by the Voron community a better stepper was from LDO.
What is the pulling force on most other direct drive extruders? (to me it seems like the pulling force on the orbiter is overkill).
Hi RainHarvester.
The force to push through the nozzle must be the determining factor? It would require more gearing to pull with less force, no?