When you are responsible for maintaining devices at a client’s location, software tools like remote desktop and SSH are great, but sometimes they are not enough. For some problems, you need to get eyes and hands on the device to figure out what’s going on and fix the problem. This is a challenge [Will Donaldson] from EDM Studio is all too familiar with. They develop and maintain interactive museum exhibits all over the world, so they created Omni, a modular telepresence robot for inspection, maintenance, and a variety of other tasks.
The Omni uses a set of three omni-wheels under its base, powered by DC geared motors with encoders, each controlled by a separate motor driver and Arduino Nano. A similar arrangement was used by Mark Rober for his domino art robot. The main controller is a Raspberry Pi 4 running ROS2 (Robot Operating System), which takes inputs from a 360 LIDAR sensor, high-quality camera module, and IMU.
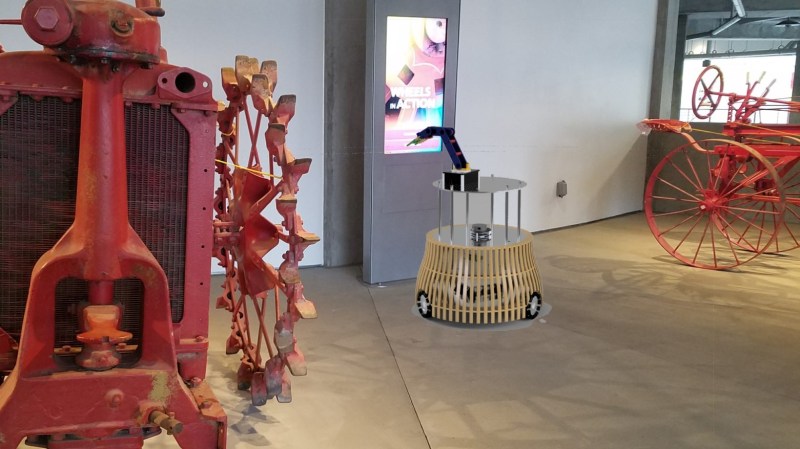
All the components are mounted on a series of plates separated using threaded rods. This arrangement allows for maximum flexibility and space, especially the open-top plate, which has a grid of holes machined in to allow almost anything to be mounted. In this case, a robotic arm is mounted for manipulating the environment. Another neat feature is the charging station connector, consisting of two parallel metal strips on the outside of the robot.
Omni’s mission is very similar to that of Spot, the robotic dog from Boston Dynamics intended, among other things, for Industrial Inspection. What practical purposes would you use Omni for? Let us know in the comments below.














Dalek 1.0
Quick! Somebody call the doctor! I bet he will want to destroy it BEFORE it starts spurting exterminate and trying to kill his people
As a (former) interactive exbition designer, builder and service engineer I see little use to that. Unless it’s an exhitbit on it’s own. Or it’s there just to calm the customer. Exhibits experience either software failures (that are diagnosed remotly anyway) or hardware due to use or vandalism. And here the robot is helpless. Even if it looks on top of anything there is no way to know if anythng is broken on the inside..
Alright, after reading the description on hackaday.io it makes sense, since it is not devoted to do any maintenance beyond tapping a tocuhscreen
Exhibit developer and member of the OMNi team here … Exactly, touching a screen, swiping an RFID card, taking a photo of a screen to confirm the display is actually on, testing a proximity sensor, etc. All things we can’t do remotely and often end up asking folks in the museum to do on our behalf. And if the robot also brings joy to the visitor, an added bonus.
Cool. That’s quite a juxtaposition among all the old-timey farm equipment.
Maybe it should be painted “Farmall Red”…
B^)
Loading dishwashers, sorting garbage etc are generally low paid despised jobs. Turn Omni upside down, have sturdy grippers, mount on a rigid frame, with the material to be sorted placed underneath. With video links and remote operation much of the job can be outsourced or done by attendants who cannot otherwise go to the job site. Cuts down on plastic waste if restaurants have dish cleaning facilities. Think telepresence robotic wait staff, food delivery and removal of used dishes if the customer places used dishes into waiting transport robot. Not high-end dining but better than a drive-through window experience. Nerds may pay a premium if the food is good. I have seen the occasional train model delivery restaurant where a model train delivers the meal to customers. Many restaurants now have QR signs instead of menus. The QR code can take you to an app to order (with human back-up to answer questions). I wonder if you have to tip the robots? They certainly could remember you at your next visit.
“I wonder if you have to tip the robots?”
As in cow tipping?
B^)
It’s great! Just to say, all the “right stuff” for precision navigation on flat and smooth surfaces.