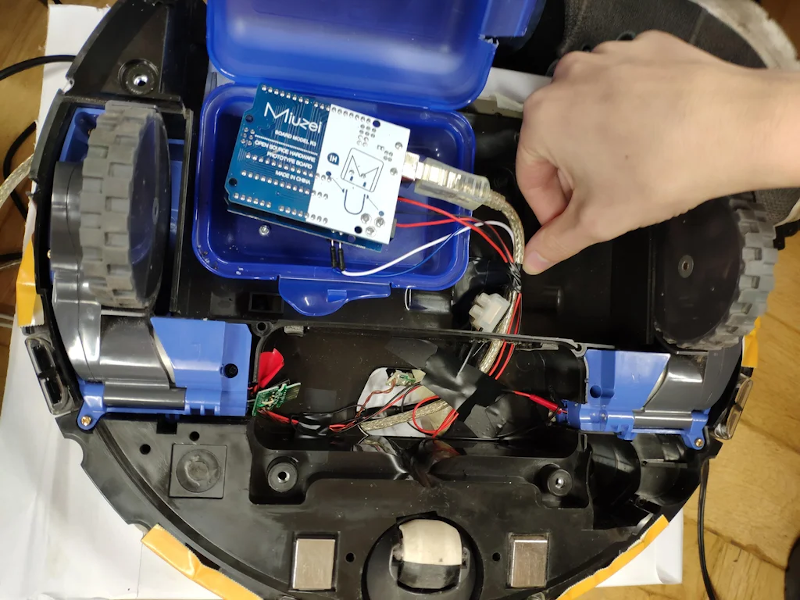
There are several projects you can imagine where it would be useful to have a robot follow you. For example, we’ve always wanted luggage that would trail us at the airport and we’ve seen several coolers that will follow you. [Madmax95] apparently dream of having a medical cart following a patient, though, and that’s good too. But how do you do it? [Max’s] method was to strip down a Roomba and build a work table and electronics on it. An Arduino controls the motor and communicates with a PC. The PC reads video from a Kinect camera on the robot and uses special tracking software to follow the patient.
We could easily imagine all of this project except the tracking. That depended on a service called Nuitrack. There is a free version that only works for 3 minutes, but it costs if you want to use it practically. However, it would still be cheaper than rolling your own if your time has value.
Nuitrack can do body tracking, face tracking, and also gesture recognition. So it would be easy to imagine commanding the robot using some sort of Jedi-style gesture. It looks like using this makes the project significantly easier than you’d imagine.
The project also uses Thingsboard to create a simple control panel. This is another solution that requires a subscription, but there is a free community edition you can host locally.
Overall, we probably won’t duplicate this robot ourselves, but we were interested in learning how we could pull off something similar for other projects. We’ve seen variations of this done with things like OpenCV. Our suitcase idea, by the way, isn’t original, but we wonder about how much packing volume you lose for batteries, electronics, and we imagine the airlines will be unhappy stowing one.














Neat idea.
By the way AdaFruit sells a already made for action product “iRobot Create® 2 Programmable Robot” that all you have to do is add all your equipment (say RPI board, with a camera, etc.) top side or even inside as the vaccuum portion of Roomba robot has been stripped out…. Therefore use openCV or roll your own software to ‘make it so’ as you can just use the RPI to ‘tell’ the robot where to go. Got one of these, but busy with other projects at the moment.
https://www.adafruit.com/product/2388
For a decade I wanted this for my shop vac to minimize cord/hose tangle
Insert “In Soviet Russia…” joke here.
I actually considered it but given all that’s going on decided against it.
Intels OpenBot has a person follower mode, that might be an easier route
for the luggage you’d need to chop down some sapient pearwood for the beginning..
Came here for the Discworld reference, leave satisfied.
Roomba 555, that was used here, has “Open Interface” support: https://www.irobot.lv/uploaded_files/File/iRobot_Roomba_500_Open_Interface_Spec.pdf
So it can be connected to the PC using just USB-RS232 converter without using Arduino.
Nice.. the “could have done it with a 555” response made it