Motors are all well and good for moving things, but they’re all about the round-and-round. Sometimes, you need to move something back and forth, and for that a linear actuator will do the trick. While they can be readily sourced for under $50 online, [Michael Rechtin] genuinely felt like reinventing the wheel, and managed to whip up a 3D-printed design that costs under 20 bucks.
The basic design is simple, consisting of a small motor which is geared down through several stages using simple spur gears. The last gear in the train is tasked with turning a lead screw which drives the arm of the linear actuator back and forward.
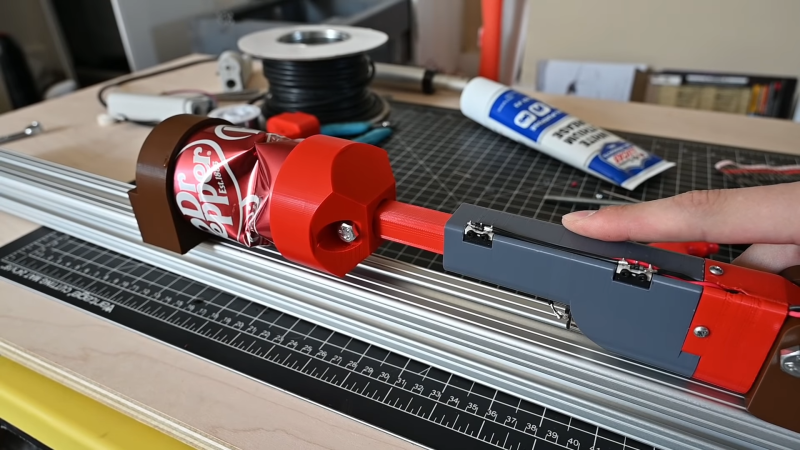
For simplicity, [Michael] used a 24V brushed DC gearmotor for its low cost and the fact it already has a step-down gearbox integrated into the design. It’s paired with a couple more 3D-printed spur gears to provide even more torque. Instead of a fancy lead screw, the build instead just uses a quarter-inch bolt sourced from Home Depot, which can be had much cheaper. This pushes a 3D-printed arm back and forth thanks to a nut stuck in the arm. It’s all wrapped up in a neat-and-tidy 3D-printed housing. The design is able to push with a force of roughly 220 lbs. For a more practical idea of its strength, it can readily crush an empty soda can.
The video on the design is great, showing how important features like limit switches are added, and how the wiring can be neatly hidden away inside the housing. We’ve seen [Michael’s] work before, too, like strength testing various types of 3D printed gears. Video after the break.
[Thanks to Sebastian for the tip!]














Now for some hazardous environment testing. I bet they wont live up in 200 deg F heat. Also probably wont live in a high nox environment
Yeah, I really wish HaD would stop with the neato “I wanted to make this thing simply because I could, and so can you” articles and focus on the clearly better things they modeled them after. None of us HaD readers would ever foolishly spend our time designing our own parts at home when we could just buy them. That’s just not the hacker way.
Lets have an article on how to 3d print 2x4s!
Off the shelf is _always_ the way to go, if it exists and isn’t unreasonably priced.
Hacking up things readily available is a waste of time.
Outside of “order it from China”, it’s actually somewhat difficult to find these kinds of motors at reasonable prices. The companies that sell them target industrial customers who won’t balk at a $500 price tag for a simple servomotor because it’s tiny in the total budget for whatever they’re building. There’s also a nasty habit where the local suppliers won’t even post prices because they don’t want to sell you ones and twos. If you got to ask, you can’t afford it. “Call us for a quote” – no, I just want to buy a simple motor.
Being able to print one to at least prototype the mechanism is a brilliant option.
Yeah. I’m spending $800 at work on a geared DC motor and simple speed controller because they’re the cheapest, most “reasonable” industrial solution (that’s reliably in stock, at least) to spin a little belt drive system. I had a $15 stepper, $3 stepper driver and $2 Arduino clone lying around that I used for the prototype, and they performed better than the “industrial” solution ever will.
>and they performed better than the “industrial” solution ever will.
For as long as they would last. With the off-the-shelf solution you’re paying for robustness and not having to build your own electronics from scratch every time, which would cost the $800 in time and wages.
Plus, when you send it to manufacturing, you don’t want any extra steps like programming an Arduino, because you have to specify it like you were instructing a ten year old child who’s doing it for the first time. The technicians who will put it together somewhere half-way across the world don’t know anything about how it works, they’re just putting tab A to slot B.
No matter how clear the instructions, eventually you get the phone call back: “We press clicky thing, it no work, kindly help sir!”.
While there are a lot of off the shelf linear actuators, sometimes they don’t fit your needs or are much more than is needed for the price. I happen to be building some custom ones next month myself.
Not everyone has a limitless budget, but plenty of time and tools. It’s not about producing commercial products, or competing with price. Usually, it’s more about the journey (learning), than the destination (finished project). Sometimes you just get an idea, and you want to test out the concept, before committing to a more complicated project. You want to know if the idea holds up, and how it performs. Mostly, you’ll use parts already on hand, or cheap an easy to source. Hacking, is more about making use of what you have on hand, not what you can buy off the shelf. It’s not always about money, or creating a commercial product.
This.
3d printing started for rapid prototyping, and still excels there. Manufacturing, commercialization and industrial-use are other problems/stages. Testing solutions should be done early; each solution will be “wrong”, but together address the real problem:
“Will it be worth it?”
3D prints can have some benefits, particularly if you get the design files:
– Shorter lead times and/or lower cost
– Easier to modify
– No shortage of replacement parts
– Easier to get a version scaled by 50-200% (12.5-800% by volume)
Let’s make DIY resistors from African sand!
Years ago, I wanted a retractable keyboard in my center console for my carpc. Most actuators at the time where way too big and way too expensive. Plus I didn’t want one so strong that if the alignment was off, it would break the dash or cause other damage. Though I suppose if I had a 3D printer back then, I probably would have done something akin to a CD tray mechanism. Didn’t end up keeping it because of the ergonomics, but point is, even if it’s not the most practical for all applications, doesn’t mean it’s not useful for others.
Each time someone makes something like this and publishes the files we are slightly less reliant on Chinese / Overpriced western industrial hardware
…”we are slightly less reliant on Chinese / Overpriced western in dustrial hardware. So, yeah, screw the Chinese by 3D printing your own hardware using your Chinese made 3D printer…oh wait!
Ah the opposition to the “not a hack” faction, the “don’t experiment and just buy it” group. Seriously ironic that you claim that not “foolishly spend[ing] our time” but instead “just buy them” is the hacker way. How about this: you aren’t the end all be all source for what hacking is and you certainly don’t have a moral leg to stand on to tell other people what they should enjoy doing for their own hobby and should enjoy spending their own time or money on. And because I know you’ll have some subversive snarky reply I’ll finish up with this gem: “If you don’t like an particular genre of article then just don’t read it, whining about it in the comments is clearly a foolish way to spend your time!”.
I’d like to report this comment as based
Based? Sorry I don’t follow.
“I bet they wont live up in 200 deg F heat. Also probably wont live in a high nox environment.”
Not the intended environments, I’m sure. And for people griping about its utility, how many stupid time keeping devices do we endlessly see here as projects? Octal display using LEDs anyone?
I’d call this, “Linear actuator assembled with help of 3D printed parts” since commodity hardware seems to be doing all the actual work.
One set of spur gears is 3D printed.
Regardless of feelings on clickbaity-ness of the headline, this is definitely the way to design homemade mechanism. Extremely cheap components from China, 3d printed housings and replacements for components that would be expensive.
Nice job. I can see it being handy in the case where you can’t either get the size or shape or price you want it.
Looks like you learned some stuff in the process of building this. Thx for sharing.
I learned something form watching the video, you can get cheepo pre fab linear actuators for a lot less than you used to be able to get them for.
I tend to hack on things I can not afford and I can do it for less. Still I liked seeing the teardown of the commercial one.
The cheapo linear motors are also a bit crud. They crunch and wobble, and the parts are wonky.
Got burned with some cheap motors from the US, which I thought would be higher quality but they were actually just re-selling a bunch of stuff from China.
I’ll state that even if you buy two of the el-cheapo ones at the same time, they may not have the same traversal rate, or stop in the same position as each other.
I bought two for a coffee table with a lift top, and one of the actuators outpaces the other enough that the table top is nearly an inch off level at the top of travel. the controller I’m using has a provision for external limit switches, but it becomes annoying to tune in just the right place to put the thing and have both stop at the same time. :(
That’s to be expected with brushed DC motors anyways. There’s always going to be differences in the construction, the loading of the motors, and the wear of the parts.
It’s just not a synchronous system. You need a feedback loop to make it so, which means you either need a motor with a tach output, or you need to put some sort of encoder on it.
Pritstick glue tubes can be repurposed to make relatively compact linear actuators and they can generate a fair amount of force before the break without any real modification. Setting resin in the glue holder can increase the strength without much of an increase in weight, it also allows for fixings to be embedded into it. PC hex stand off nuts seem to work okay for the purpose.
There’s a couple of sizes in the stick glue, then smaller is lip balm/gloss and deoderant sticks might come a tad larger than the largest glue.
That’s a really good suggestion, thanks!