Robotic arms and actuators are compelling things to watch, and as popular among the maker set as they are crucial to modern industry. [kthod2000] built a design of their own, which relies on parts salvaged from old CD-ROM drives.
The arm itself is constructed of many components which appear to be 3D printed, with three main motors visible along its length. These look to be the eject motors harvested from several optical drives, which usefully come with a threaded screw on the output shaft that makes them perfect for a linear-drive application. Run by a TMC2208 driver via a microcontroller, the eject motors control the motion of several stages of the robot arm as it moves up and down.
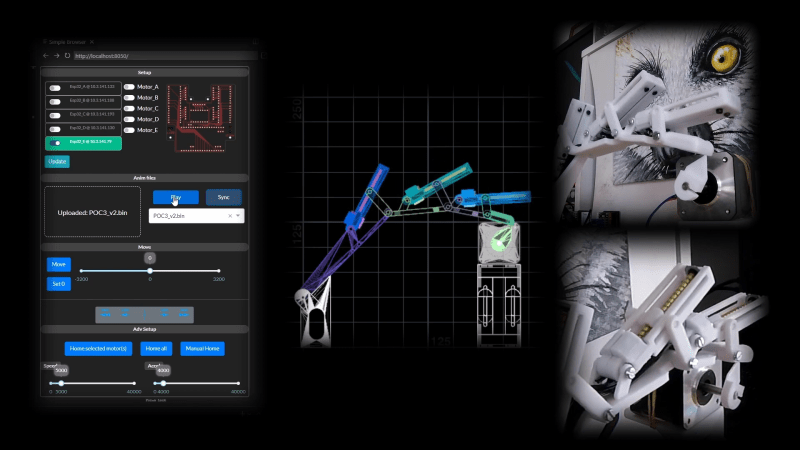
The intention seems to be that one of these three-tiered assemblies could act as a single finger. Ganged up multiple times, this could allow the creation of something akin to a full five-digit robot hand. [kthod2000] has also done plenty of work on the software side of things that handles controlling the arm. The kinematics can all be simulated on screen in concert with the real motion of the arm.
We’ve seen similar builds before, too, like this plotter built out of scrap DVD drives. They’re a great source of quality electromechanical components for small projects, so it’s no surprise to see them put to work here. Video after the break.














Nice, but those are head-tracking stepper motors, nothing to do with the eject mechanism. That’s usually driven by a 5v motor driving a rack and pinion.
Totally accurate, i choose those mainly for their price tag as they are heavely produced for lens positionning.
It was great to discover they could produce enough torque for my needs.
The main issue was that i could not replace the metal part (heavy) that support the screw nor shorten the lenght, thats why i ended up with this strange arrangement.
Thx for the clarification.
K_thod
It seems like a miniature linear hobby servo would be an interesting next step if one wanted to miniaturize this or cut down on the weight or bulk of the finger tip servos. I like the design. I tried something similar a few years back, but I mounted nuts and bolts in the joints and tried using bolin cables routed down through the wrist, so the motors could be relocated into the forearm, leaving room in the fingers for sensors. I was going to experiment with a liquid filled IR skin but I never did get around to finishing it.
I’d also like to find linear servos small and light enough ( and cheap…abd powerfull )…but i really wanted to confront my self with steppers ;)..
I also did a prototype years ago with servos and a fishing line system. Ended up not precise enough for my needs and doing the math that involve those cables along multiple articulations was above my knowledge :)..
Thanks for the reply,
K_thod
I don’t think that those would save too much weight or size, and would be significantly less repeatable. Repeatability is ultra-important in multi-segmented robots, especially at the earlier joints, so I’d hesitate to put a hobbyist linear servo, with all their backlash, pot-based feedback and voltage-dependent positioning, on any but the final joint.
Anybody know what software is used for the simulation/visualization? Looks very useful.
Hello, i used sidefx houdini (procedural software) as i needed a lot of iterations and didnt wanted to spend time pushing vertices..
I dug through a few of their videos. It looks like the control UI is something custom. The animations seems to be in Vicon Shogun, typically used for motion capture.
UI is made using ‘dash’, a great way to create webpages python based, really enjoyed discovering that.
And for the mocap, you’re right, Vicon system with a custom setup to achieve max accuracy on finger animation capture
(second try to send this msg)
Hello, SideFx is used for the modeling aspect as i needed to be iteration ready…this is a procedural software that is awesome
Many thanks for the extra info. You should write up a howto.
If anything, I’m most impressed by the UI, and there are plenty of things to be impressed by here.