
Multirotor drones are significantly more popular than conventional helicopter designs for many reasons, which do not include efficiency. Making use of the aerodynamic effects behind this, [Nicholas Rehm] was able to significantly increase the efficiency of his experimental tricopter by turning it into one large spinning propeller.
Since aerodynamic drag is proportional to velocity, a small, high-RPM propeller will require more power to produce the same thrust as a large, low-RPM propeller. With this in mind, [Nicholas] built a tricopter that can rotate all three long arms together using a single servo, giving it very aggressive yaw control. By attaching a wing to each of the arms, it becomes a large variable pitch propeller powered by tip thrusters.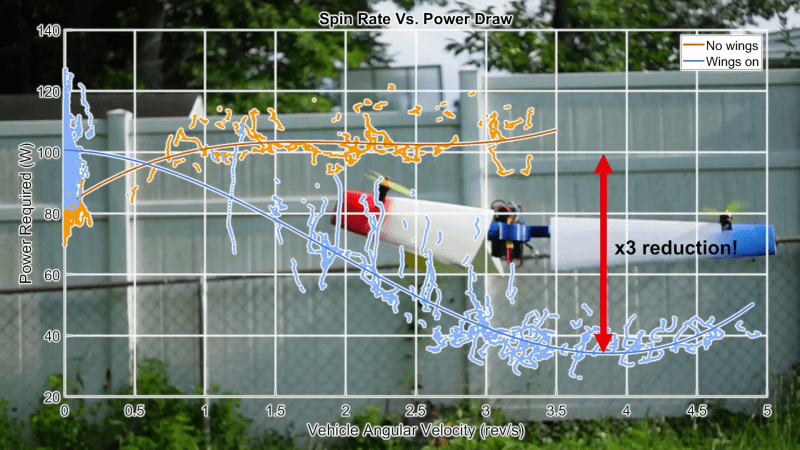
To measure the efficiency of the craft, a small lidar sensor was added to allow accurate PID altitude control. While keeping the drone at a constant altitude a few feet off the ground, [Nicholas] measured the power draw of the motors in a hover, and then let the drone spin around its yaw axis up to almost 5 rev/s.
At a spin rate of 4 rev/s, the power draw of the motors was reduced by more than 60%. Even compared to the drone without the added weight of the wings, it still used 50% less power to maintain altitude.
Since [Nicholas] hadn’t yet implemented horizontal position control while spinning, the length of each test run was limited by the wind drift. He plans to solve this, and also do some testing of the drone in horizontal flight, where the added airfoils will also increase efficiency.
We’ve featured a few of [Nicholas]’ flying machines here on Hackaday, including a foam F-35 VTOL and a cyclocopter. Most of his aircraft run his open source dRehmFlight flight stabilization, created specifically for hacking.














A compass seems like the best way to tell it’s directional orientation but in order to indicate (visually) which way it’s “pointing” there needs to be some LEDs added. Higher RPMs will result in a PoV effect which will make it easier to comprehend. Naturally, the onboard MCU will need to convert the remote directional instructions into correctly timed increases in prop speed.
Camera rotation could be compensated for by capturing a pic at one directional orientation, if accurate enough. the video would have a slow variable frame rate corresponding to the rotation speed, but usable if the direction were accurate. There might be a way to orient the drone to the transmitter by using a yagi antenna and measuring the signal strength during rotation.
Just have a counter rotating centre to mount the camera. The center will appear stationary.
A gyroscope might be better at that… All you’ll need once the gyro spins is power to counter the loss in the various axles… I.e. retain gyro’s speed and prevent the camera unit from slowly spinning due to friction.
Much simpler to use a high frame rate camera and encode the instantaneous heading in each frame, then display the screen using a matrix multiply to to rotate the screen into the correct orientation for the viewer.
I can’t reply to Hermit, but high frame rate camera is a good idea… And why bother encoding heading? Just join images together in postprocessing, you’ll get 360° video, or you can lock a viewport in any desired direction.
Efficiency of anything flying is related to how much air it manages to push downward.
It is something like mass/second * output velocity = m * g.
Now if you double the amount of mass of air you “process” each second, the output velocity can be reduced by 2x. Doesn’t make much difference you say? But it does! Because the energy you’ve had to impart on that air goes up by velocity squared, the amount of energy lost into that air has reduced by 4x…. except that it is double the amount of air. So the result is that you only gain 2x in efficiency.
So that tricoopter that he starts with, with the ridiculously small propellers….. that’s ridiculously inefficient. If your device has a diameter of say 1m, you want the largest possible surface area swept by the propellers.
Maximum propulsion efficiency of the small tip mounted props spinning a large prop is going to be 66.7% so a direct drive to two counter rotating large props, tandem or off set, will be more efficient hovering than pin wheel propulsion.
A possible serious application of this might be an air ship where good propulsion efficiency requires a prop diameter on par with the airship’s dimensions. The rpm in that situation is so low and the torque so huge, the drive gearing becomes prohibitively heavy, even with the prop mounted on a big hollow carbon shaft.
Then it might be better to go with a huge inflatable prop built much like the airship itself, either attached to the airship or like in the video, the inflatable prop is the airship.
Bret
The challenge with direct drive counterrotating is the need for cyclic control of your prop angle.
I’m guessing the tip props give just enough control authority of cyclic here to avoid the need for cyclic control of the wings.
I’ve seen some people add collective pitch to the individual props of a quad to get better control (including ability to fly inverted stable), this should also allow you to greatly increase prop diameter (higher efficiency) without the usual negatives of this for quads (rotational inertia of large props leads to control issues). But no one seems to have bothered to use collective pitch on a quad to achieve heavy-lift instead of ultramaneuverability.
You got units of force in an odd way of using mass flow with the mass/second. But you do need an acceleration to get a force. If you define “output velocity” as change in velocity, it works out. You need it in 2 dimensions in this discussion.
Or you could despin a pod of some sort, use a sun detection scheme. Now you need individual controls for the blades which is beyond the original intent, I believe
The Germans WWII Focke-Wulf Triebflügel was something similar but designed for different reasons https://en.wikipedia.org/wiki/Focke-Wulf_Triebfl%C3%BCgel
Thanks for pointing that out
Anyone remember the Samara ?
https://hackaday.com/2009/11/11/single-wing-flight-based-on-maple-seed-aerodynamics/
I recall many others over at RC Groups back then and even before. Efficiency of a large rotating airfoil is well known. IIRC a single blade should be more efficient than multiple blades. And I’d bet that today a spinning simple line array of “pixels” is easy to process into a picture.
In motion a single blade is best, in hover more blades are better.
However the single blade thing isn’t that important, where single blade props are used it’s largely to protect the blade during landing (the blade should stop on the compression stroke, and is clocked to be pointing up). Crazy fast RC planes don’t have landing gear, or throttles or anything that doesn’t make them go faster.
Big old helicopters run lots of blades on their rotors.
Regarding the drag explanation for efficiency, I checked up on that and it seems that the reason is actually due to smaller propellers acting on less mass of air, therefore impacting significantly more kinetic energy to the air for the same thrust, see this stackexchange:
https://drones.stackexchange.com/questions/961/why-are-larger-propellers-generally-more-efficient-than-smaller-ones
This would imply that even impossible drag-free propellers would still be more efficient when larger.
Drag is a function of velocity squared, so is lift.
Your explanation is right, you pay kinetic energy, but get momentum.
Larger wings are heavier, so it’s a tradeoff.
Yeah, this is a common thread through prop plane design. Especially before high speed became an interest near the end of the war, one of the best things you could do for a prop plane was go for a larger prop with fewer blades. The high blade count in many props was only resorted to because ground clearance limitation made larger props impossible, and they needed more effective prop area to exert the increasingly overpowered engines’ output on the air, even if at a lower efficiency than a larger prop.
The mid-2000’s WowWee BladeStar used a similar configuration:
https://web.archive.org/web/20090226134638/http://www.wowwee.com/en/products/toys/flight/flytech/bladestar
I had one of those. It was an IR controlled indoor flyer. It was supposed to maneuver but it didn’t do very well at that. The method was to pulse the motor at the proper angle of rotation to produce an asymmetric lift. Perhaps in theory it worked. I thought that putting the motors on fulcrums, so they’d pivot upward with increased RPM/thrust and thus create an cyclic thrust might work but I never got a chance to try it. Flaperons on the blades was another idea.
https://www.meme-arsenal.com/memes/0ca36be035e2c8c79d6af4543c7a6990.jpg
Yo dawg heard you like propellers
So, lately HaD has shown us DOOM playing inside DOOM, and propellers with propellers!
This gives a new meaning to the word tiltrotor. https://en.wikipedia.org/wiki/Tiltrotor
Also, when tilting to 45 degrees, ( @00:38) you “only” need sqrt(2) extra force from the motors, instead of a factor two.
I think that tying the thing to the ground with a cord and a swivel (and a loadcell for measuring force) can be a good setup for testing. This way you can measure (and optimise) for maximum lift or maximum efficiency while keeping the whole thing stationary. You can even add a powercord instead of just a simple cord so testing can be done without having to bother with charging batteries.
Another thing to try is to put the propellers on the back of the wings. This keeps the propeller turbulence away from the wings and makes them more efficient.
And if you reduce the number of rotors to two, horizontal flight becomes even more efficient?
I.e. with three rotors one could transition to a star wars “Y” fighter, with two rotors a flying wing?
Optimal airfoil ??
The central gear box would need a servo on each rotor?
And two servos (one for rotation and one for aiming up/down) to aim/stabilize the camera & controls.
Ugh, correct terminology? Two versus three blades in the helicopter sense (not rotors). Versus number of blades on each motor.
One issue would be lack of pitch (or yaw, depending on how you define the axes. Really I’m just talking about rotation about the wing axis) control. You could get around this by having blown elevons (or rudderons, again depending on axis definition) on the wings, as some other interesting VTOL craft have done, but then you have the weight penalty of those control surfaces, and they need to hold up well to the spinning. I also suspect it’d be a ton less inherently stable in the “macro-prop” mode, as the moment of inertia would be tiny around the wing axis, likely leading to it pitching/yawing out of control very quickly. My gut tells me this would be the larger issue, and likely a near-insurmountable one. You might be able to get around it with a really, really, really tight control loop on those elevons/rudderons, which is difficult to do with hobby servos.
Considering this thing will never be super efficient in forward flight, 2 surfaces or 3, I suspect the tradeoffs wouldn’t be worth it. It’d be really cool to see, though, a hybrid of two unconventional VTOL schemes.
Pitch control on forward flying: intuitively understand the pitch control problem especially on the two wing/blade version. Would do a vestigial third “wing”, AKA counter rotating pod with propeller and landing struts. If necessary add a tail to the pod. Don’t understand why would not be as efficient in forward mode as any other winged plane?
This is very interesting. I’m looking forward to the next video.
I as well! I’m interested in what he’ll do for horizontal flight. Will he just transition from big spinning rotor back to traditional tricopter first (that would be simplest) or try to tilt the big rotor first and then transition (or not)? The latter will need to account for the gyroscopic aspect the is present in a tricopter.
… is NOT present in a normal tricopter.
Add another cry for an edit button.
Near the end of the video he does show it flying horizontal like a Star Wars Y-wing.
Incredible work!
Cool but how does it compare to a helicopter of similar power and weight.
I never understood the multicopter trend. Helicopters are quieter, can lift more and are more efficient.
Mobility is same too.
https://youtu.be/Lq62GXEX4-U?t=66
Even model helicopters are maintenance heavy. Look up the cost per minute of your favorite FAA certified helicopter. Prepare to be shocked. You have to have Bill Burr type money to fly helis for fun. Exception for helicycle type kits.
Multirotors are cheap and easy. That will change when the FAA gets around to certifying them for human use. They will still be relatively cheap.
I hope the cops retire their ghetto birds soon. Waste of money. Replace them with a fixed wing and a quad in every cop car trunk.
Mechanical simplicity – with a quadcopter, you only have to vary prop speed to control the aircraft.
A standard helo needs cyclic pitch and (unless it’s a counter-rotating design) a tail rotor.
A compromise I’ve seen to improve manueverability is to have collective pitch control on each rotor of a quad – in at least one case, it also had a single motor coupled to the props instead of one motor per prop – https://curtisyoungblood.com/legacy-product-support-curtis-youngblood/attachment/stingray-500/ – it’s now discontinued, and its successor is still in “prototype” stage.
The Stingray focused on aerobatics, but it should be possible to crank up the blade lengths and reduce their rotation speed to focus on heavy lift/efficiency instead of aerobatics.
despin the center using large diameter bearings and a gyroscope and you have agreate platform for reconnaissance!
would it be possible to pitch the plane of rotation to move in any direction? Or have a mechanism like a helicopter without the Tail?
For hover purposes a very low pitch prop is more efficient. I cannot find such anywhere.
Maybe you can use the 3 prop’s arms as wings by flying your drone sideway like a star wars imperial shuttle ! But you need independent surface controls.
At what point does this simply become a odd inefficient helicopter? Like the things that I used to see in the back of magazines as a kid. Tip jet powered helicopter kits w ram Jets etc. Not meaning that in a derogatory way but just to possibly lend some shortcuts to the challenges.
Put some blades on that thing and make a roomba type lawn mower. Keep pets and kids indoors!
If you took 3 of them and used them as the props for a bigger tricopter, made them rotate, and added wings to it like you’ve done only bigger because the drone arms are bigger; then made three of them and used them as the props for an even bigger tricopter, made them rotate, and added wings to it like you’ve done only bigger because the drone arms are bigger, etc., I wonder how many fractal iterations of this you’d need to lift a person?
Would that be called “Turtles all the way up”?
And do you reckon you get that 300% power gain with each iteration? Or is it just 300% overall?
So this guy used 76 props … https://www.dailymail.co.uk/sciencetech/article-4704404/Swedish-flying-carpet-drone-carry-creator.html
Would it be:
3 winged = 9 rotor (1st iteration)
3 winged x 3 winged = 27 rotor x 3 = 81 rotor (2nd iteration) – done it with 9 rotors
Or, would it be just 300% gain overall no matter the number of iterations: 76 / 3 = 25 ?
I think the former.
Also, try Coanda effect!