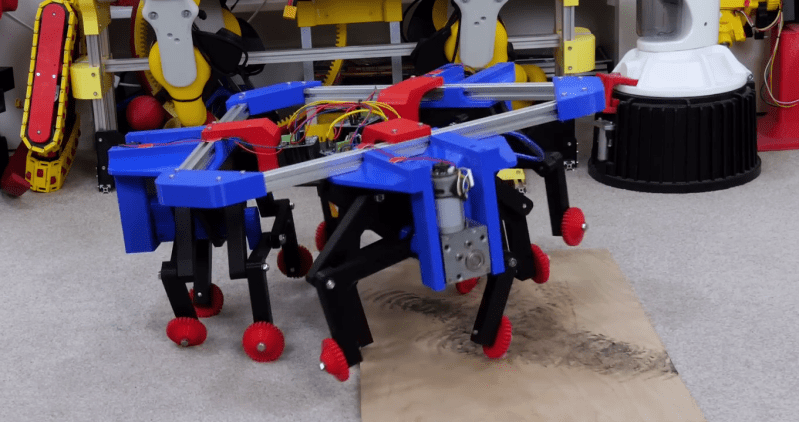
[James Bruton] is on a quest to explore all the weird and wonderful methods of robot locomotion, and in his latest project created an omnidirectional walker that can move in any direction instantaneously.
The walker actually makes use of three independent four-legged Strider mechanisms, connected in a triangle at 120deg. Wheels are attached to the bottom of each leg, oriented at a right angle to the leg’s plane of motion to allow the foot to slide. Varying the relative speed and direction of each of the mechanisms lets the robot move in any direction, similar to his ball-wheeled robot. Each strider mechanism uses a single motor and looks similar to Strandbeest walkers, but it lifts its feet to traverse rougher terrain. [James] demonstrates this with some obstacles, and found that moving in such an orientation that all three sets of legs provide the best results.
[James] planes to build a larger rideable version, but we think he should mount a chest of Sapient Pearwood to carry all his stuff and name it The Luggage.













I always enjoy James Bruton’s videos. This one looks hilarious when it walks. I can’t wait to see him make it bigger.
Well sir, I have a omnidirectional silly walk and I’d like to obtain a Government grant to help me
(AN omnidirectional)
Gotta build the Luggage!