The Strandbeest is a walking machine, a creation of the celebrated artist Theo Jansen. They can look intimidating in their complexity, but it’s quite possible to build your own. In fact, if you’ve got a 3D-printer, it can be remarkably straightforward, as [Maker 101] demonstrates.
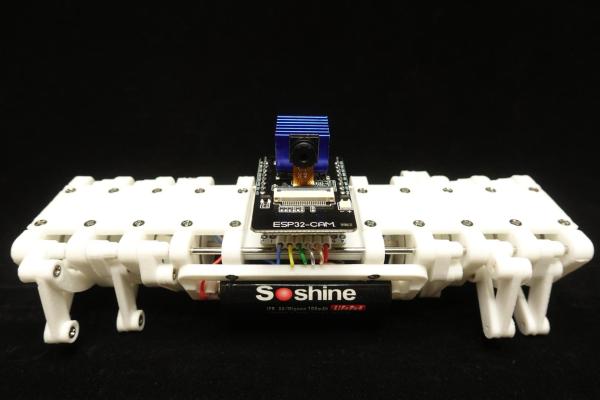
The build relies on an Arduino Uno as the brains. It’s equipped with an L293D motor driver shield to run two DC gear motors which drive the walking assemblies. Power is courtesy of a 3-cell lithium-polymer battery. The chassis, legs, and joints are all 3D-printed, and rather attractively in complimentary colors, we might add.
Controlling this little Strandbeest is simple. [Maker 101] gave the Arduino an infrared sensor which can pick up signals from a simple IR remote control. It can be driven backwards and forwards or turned left and right. What’s more, it looks particularly elegant as it walks—a hallmark of a good Strandbeest design.
Design files are available online for the curious. We love a good Strandbeest build, and some can even be useful, too! Video after the break.
Continue reading “Building A 3D-Printed Strandbeest”