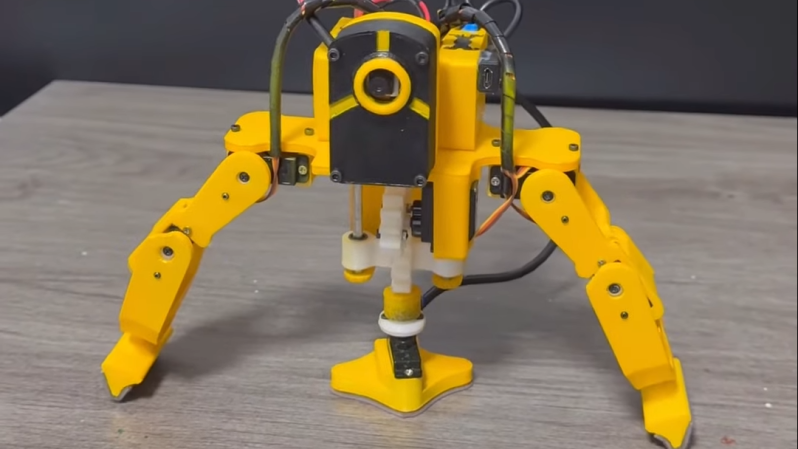
[hannu_hell] created Dodge as a “novel design of tripod.” It’s a small robotic device quite unlike anything else we’ve seen of late. It’s intended to be a self-mobile camera platform that can move itself around to capture footage as needed.
Dodge is essentially a two-legged robot with a large flat “foot” in the center. When stationary, it rests on this flat foot. When it needs to move, it can raise this center foot and rest on its two outside legs. If Dodge needs to move, it can crab back and forth in a line with these two legs. If it wants to turn, it can return to resting on its center foot, and pivot about its central axis. It can thus rotate itself and use its two outer legs to move further as needed.
Dodge does all this while carrying an ESP32 Cam module. The idea is that it’s a small mobile tripod platform with a live camera feed. It reminds us of various small monitoring robots from cartoons and anime.
Ultimately, it’s an interesting take on robot locomotion. Rather than walking with two legs or four legs and dynamic stability, it takes full advantage of static stability instead.
We’ve seen some wild roboticized camera rigs over the years. Video after the break.














There was a robot toy that moved in a similar fashion but the legs used linkages. It was some kind of toy battlebot. But this one has a little more personality and a fun execution.
hexbug inchworm
Cute, but what’s the use case? Am I missing something?
Very jolty motion, so no use for pan shots etc. Not very stable as it vibrates every time a servo moves even if they’re just in mid air.
And no use for remote control as you can’t see in the directions it can move?
It’s a security cam with distractions to make you stare straight at it. Just try to look away! Can probably identify you you by your dental records too from all the grins. :)
I believe that the motion jerk mostly comes down to programming. You are right about the deficiency in camera control, however. Even if a revision comes up with some workaround for the camera not facing the direction of travel, it absolutely needs a tilt mechanism if it’s going to be that low to the ground.
It’s a cute little design, but it’s a solution searching for a problem that can’t be solved more elegantly by other means.
Yeah there is absolutely no smoothing on those servos, they are just sent the end position and go there are fast as possible. Even extremely basic motion smoothing would make it much better and is easy to implement.
Use case? Tachikoma Mark I of course!
Your right it does kinda remind you of an early maybe prototype version of a Tachikoma from Ghost in the Shell
Hmmm, the instructables page has a section on kinematic analysis of the legs, but the code is just the sequence of servo end positions.
I actually wonder whether the creator was under some kind of time pressure, the rest of the project is really well documented and the physical machine itself is quite neat.
There’s even a kinematics library in the Arduino library manager that can help with computing both forward and inverse kinematics.
I’d honestly like to see a follow up on this one.
You give humans the ability to 3D print; next thing you get is nonsense like this. Go ahead, tip it over – I dare you! What’s the recovery stategy?
How does Dodge differ from conventional robotic designs in terms of its locomotion mechanism and stability principles?
Please attach a gun on it!
If you want it to be statically stable but still mobile then a hexapod design would be much more effective and would allow smooth motion in any direction, including tilting the camera.
Adding a gimbal or soft mounting the camera would likely improve things a lot too.