Monorails aren’t just the core reason why The Simpsons remains on air after thirty-six seasons, twenty-six of which are unredeemable garbage. They’re also an interesting example of oddball rail travel which has never really caught on beyond the odd gadgetbahn project here and there. [Hyperspace Pirate] recently decided to investigate the most interesting kind of monorail of all—the gyro stabilized type—on a small scale for our viewing pleasure.
The idea of a gyro-stabilized monorail is to use active stability systems to allow a train to balance on a single very thin rail. The benefits of this are questionable; one ends up with an incredibly expensive and complex rail vehicle that must always run perfectly or else it will tip over. However, it is charming to watch in action.
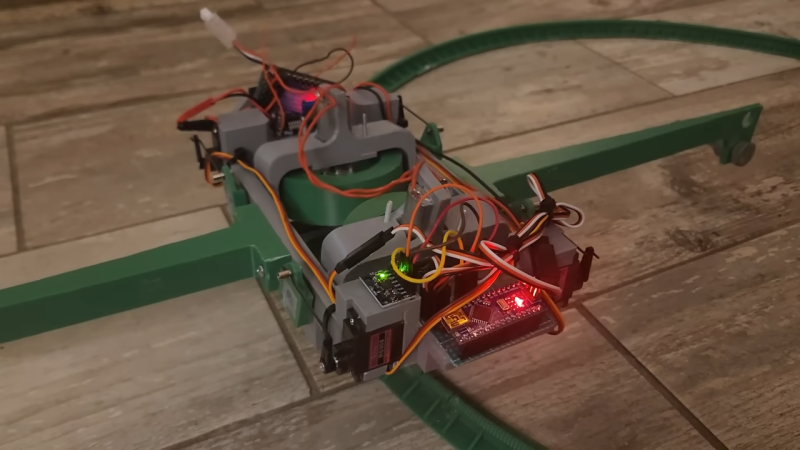
[Hyperspace Pirate] explains how the monorail vehicle uses control moment gyroscopes to keep itself upright. The video also explains the more common concept of reaction wheels so the two systems can be contrasted and compared. It all culminates in a wonderful practical demonstration with a small 3D printed version of a 20th-century gyro monorail running on a 24″ track.
If you’re studying mechanical engineering this is a great project to pore over to see theoretical principles put into obvious practice. Video after the break.













I don’t get the Simpsons comment at the beginning?
Maybe this will help.
https://m.youtube.com/watch?v=taJ4MFCxiuo&pp=ygURc2ltcHNvbnMgbW9ub3JhaWw%3D
@Lewin Day said: “If you’re studying mechanical engineering this is a great project to pore over to see theoretical principles put into obvious practice.”
If you are studying any sort of Engineering (not just Mechanical Engineering) you must be studying three fundamental subjects that easily includes this project: 1. Engineering Mechanics – Statics, 2. Engineering Mechanics – Dynamics, and 3. Systems Engineering.
I hear those things are awfully loud.
I don’t remember Seattle’s monorail being noisy, but its rail was wide and it runs on rubber tires.
Hyperspace Pirate‘s video is hilariously dry in its wit – he is so funny.
“This is the end of the video. So bye.”
From wikipedia: Gadgetbahn is a neologism that refers to a public transport concept or implementation that is touted by its developers and supporters as futuristic or innovative, but in practice is less feasible, reliable, and more expensive than traditional modes such as buses, trams and trains. It is a portmanteau of the English word “gadget” and the German word Bahn, meaning “train” or “railway”.
Damn I’m not updated with these new words! To do list: remove brodie and boondoggle and add Gadgetbahn in my vocabulary. Abyssinia!
you will pry “boondoggle” from my cold dead fingers!
Wow, excellent video and project and explaination of the physics involved.
I would use aluminum rotors, easier to work with and better compromise between plastic and steel for mass. I used a single rotor rather than two, just easier and actually very smooth operation achievable. And yes, rather than servos, use a dc motor with a gear to change the rotation of the gimble because when no power is applied to the motor, the motor has such little torque that the gimble is free to move without restriction.
Now I know some will say “well, where is your model know it all!”. Here it is: https://youtu.be/UUfhcObPBeE
Also I forgot to mention, and very important, the cmg must be top heavy as in the rotor, if it is on top of the motor spinning the rotor, must be heavier than the motor so that the gyroscope becomes self balancing. I find that a CG of 1 cm above the gimbal axis works well.
Thanks for adding “gadgetbahn” to my vocabulary. The Simpsons had more that 10 good seasons though. Just like in the 1990s, there are some hilarious episodes and some absolute garbage… but we have forgotten the old garbage.
Have you looked into the system Louis Brennan came up with in 1910 for his working full size self balancing monorail?