Whenever you buy a servo, it usually comes with a little baggie full of various plastic horns. Most of us pick our favorite and use it in our projects. Some of us hack them up, glue them back together, and do all kinds of weird things with them. And others skip them entirely, going for direct drive instead. In a new video, [Dynamix Systems] explores when going direct drive is the right solution.
The video primarily concerns servos as they’re used in the context of aero modeling. In this regard, the video points out that while stock servo horns are easy to use, they can be cumbersome and clumsy. For example, you often end up with horns and control linkages protruding out into the airstream, adding drag and generally making things a bit inelegant. They can also snag on things and easily damage your servos or controls.
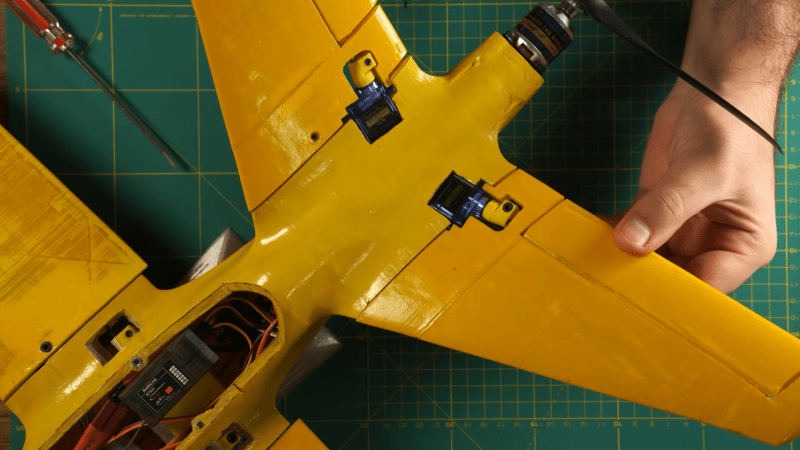
Using direct shaft couplers can be a much tidier solution in some respects. The servo can be coupled directly to the axis of motion, allowing it to be hidden inside a wing or tail surface. It can require a little more finesse in installation and design, but they’re much less likely to snag on things or be damaged. There’s also a drag benefit if you do it right. [Dynamix Systems] notes that you’ll want to source some shaft couplers to do this properly, which you can make yourself or buy online fairly easily.
It’s great to see how tidy direct drive really is. We’ve seen some other nifty servo tricks of late, too. Video after the break.














I always kind of assumed horns were meant as a sacrificial breakaway part. But given how often servo gears get stripped I guess maybe they didn’t work well if they were.
It’s a lever much longer and stronger than a gear tooth. If you want a breakaway then you might need to come up with your own solution
I used servo savers for this purpose when I was into RC cars as a kid
@Grant said: “I used servo savers for this purpose when I was into RC cars as a kid.” Yup…
https://www.amazon.com/servo-saver/s?k=servo+saver
I used to work for a General Atomics Aeronautical: they make the MQ-9B Predator amongst other UAVs and I had a friend there who was part of the aero dept who was also into RC (that’s how we knew each other). FWIW, he said, at least in full scale aircraft, direct driving the surface was a big no-no as they were vulnerable to damaging servos (big mil-spec servos built by GA) and created a huge stress riser and create a single point of failure.
I’ve done it a lot on small RC planes because it can free up a lot of design possibilities.
This is only possible with todays micro systems. Linkages were used back when servos were the size of cigarette packages and you buried them in a cavernous fuselage. Old practices that work are hard to eliminate
I’d suggest there is much more too it than just inertia of the old ideas.
Just because you can jam a small and pretty powerful servo darn nearly anywhere for direct drive now doesn’t mean it is always a good idea to do so. And even when it really could be a good fit the old ways still work great and still bring other potential gains – in this case it really isn’t a clear universal improvement to use direct drive, the clear improvement is to use modern servomotor, but how you use them…
For example in the case of model aviation weight is both a positive and negative to both methods. As direct drive aught to work out lighter overall having eliminated the linkages (though it easily could not especially at the very small scale where a bit of tape can play hinge to a servo horn actuated flap but to direct drive it the flap has to have a relatively sturdy axle to transmit the torque against the airflow.). However it isn’t ever going to be a huge weight saving and now the relatively heavy motor’s weight must be right next to the flap you are moving – so you have lost the ability to manage your CG with the placement of the servomotor and may end up having to add more mass as ballast and potentially more reinforcement to handle the g-loading…
This is only possible with todays micro systems. Linkages were used back when servos were the size of cigarette packages and you HAD to bury them in a cavernous fuselage. Old practices that work well are hard to eliminate.
Very much a solution in search of a problem. He’s lost all the benefits of the traditional way (movement/torque variation, multi-surface control from a single servo, the ability to have sacrificial elements, better flexibility in servo location to name a few), and gained… weight (more servos required) and slightly less drag, which is minimal and irrelevant. Not a win.
He touches on the 1:1 ratio and torque limits, but (not even remotely being an RC guy) I assume that mechanical advantage can be pretty important in some cases – always being 1:1 may require a stronger/larger servo which could negate or even overcome the advantages. It also locks your servo step quantization to the range you’re able to make use of in a 1:1 config, whereas with another ratio you can reduce the quantization effects.
I think using anything but the closest rung on the horn would decrease torque and put more strain on the servo gears and motor. How often do control surfaces need more range of motion?
This!!!
Before computer controlled transmitters you used the horns to set the throw for the control surface and map it to the throw of the servo.
After computer controlled transmitters you gained the ability for exponential rates, adjustable throws, etc but it is still a good idea to configure the servo so the maximum throw matched the maximum needed control surface throw so you can have a smooth control movement even when gain is being applied.
The feedback element of the servo is still a tiny potentiometer so a dirty spot will make for chattering servos. Making all your motion over a tiny range will wear out a spot on the pot much more quickly.
Flying a tail-dragger on a rough field demands a large UP throw on the elevators to keep the tail down and not ding a prop. But once airborne dialing back the throw range to keep the plane controllable is pretty helpful.
That said, this is a technique that I had not seen before and it could be fun in the right situation. I remember how extravagant it felt to use 2 aileron servos and mount them out on the wing. It was heavier but routing wire is much simpler than pushrod linkages.
one bad rc heli crash i am sure was caused by the servo gears stripping in flight. on a heli, lose any servo and crash. it used ball and socket linkages with the ball just screwed into the horn at the servo. i think maybe giving it a little more mechanical advantage would have prevented that. or maybe buy better servos.
That plane of his looks like it’s tail heavy as hell. It’s cool looking and all that, but I don’t see any actual flight videos. Bet it flies like crap. Sorry for being blunt.
I don’t expect it to fly that badly if badly at all – I’d bet the weight is or at least can be actually still quite far forward as there is lots of space for big battery at the more bulbous nose, and by the looks of it no space behind the main wing spar for anything but the wires, drive and two small servo motors (and structure holding them all obviously). And even if its tail heavier than idea the control surfaces seem sizeable with a good range of motion and modern brushless motor have the power to make a brick fly with surprising agility if you or the flight computer know how…
Also not really relevant to the concept being demonstrated if the plane can fly at all anyway – the points raised and clear aerodynamic and aesthetic benefits still stand even if this model doesn’t work very well. I still think in most cases I’d rather use servo horns or some other form of gearing – why give up any more of the range of motion and thus precision of the servo than you have to either for physical limitations on the actuated part or the speed/torque you need that part to move with. Having control of these factors beyond just selecting a servo that happens to be a good fit to direct drive is better most, but likely very far from all, of the time IMO.
If the plane doesnt fly then what is the point?
personally the benefit makes me prefer servo horns over direct couplings is that with the horns its usually easy to find a place / way to mount the servo regardless of how you built the airplane. doesn’t matter if my fuselage is a stick or a box or a kite, you just mount the servos where they make sense and the run push-pull rods from there to the control surfaces. gives you a lot of literal and figurative flexibility. i can’t say it’s been trouble free for me but…
for direct drive you need to really intentional about designing the mounting…it has to be in a precise relationship with the control surface. these days i could probably work around most if it by 3d printing brackets to hold the servos, but i like the simplicity. i’m sure it can be slick but that’s not how i build airplanes.
i remember doing lego adapters for 5g servos. to do this i dremeled a servo horn down to just the hub. drilled out an axle peg (#3749) and cut the peg part off. and then super glue the peg to the servo hub. then to align it i screwed the peg to the servo, placed it in an axle brick (#32064). built a mold out of lego around it which enabled me to pot the servo in hot glue between to 3×2 plates. then 3d printing became a thing and rendered the whole process moot.
My flying wings will not balance well without having the servo as far forward as possible. So not a viable solution for flying wings.
Displacing the servo is generally a good option, so i’m not sure DD is desirable. Horns have some flaws, but hey, they are sufficient for the task. so, why mke it more complicated than necessary?
Also, you don’t see many RC cars w/o servo-savers on the steering servo. Not quite the same situation, but maybe worth thinking about.
What hasn’t been discussed here is the evolution of servos from a very large, relatively weak and inaccurate device to ones so tiny that they can be buried in projects and are essentially disposable. Now what is needed is a servo-power arms race to make the tiniest of them as strong and durable as possible.