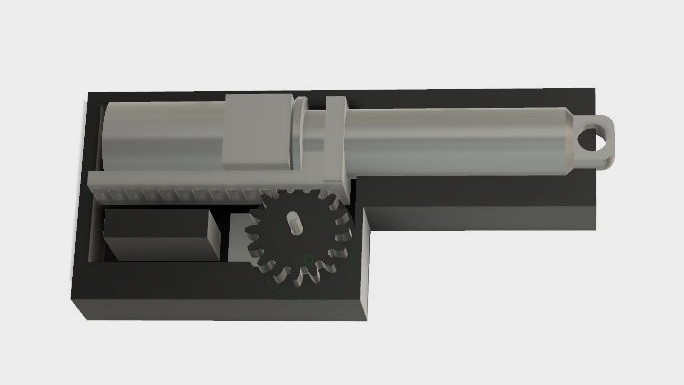
RC servos are a common component in many robotics projects, but [Giovanni Leal] needed linear motion instead of the rotary actuation that servos normally offer. The 3D Printed Mini Linear Actuator was developed as a way to turn a mini servo into a linear actuator, giving it more power in the process.
A servo uses a potentiometer attached to the output shaft in order to sense position, and the internal electronics take care of driving the motor to move the shaft to the desired angle. [Giovanni] took apart an economical mini servo and after replacing the motor with a 100:1 gear motor and using it to power a compact 3D printed linear actuator, he used the servo’s potentiometer to read the linear actuator’s position. As a result, the linear actuator can exert considerably more force than the original servo while retaining exactly the same servo interface. You can see one being assembled and tested in the video embedded below, which is part of [Giovanni]’s entry for The 2018 Hackaday Prize.
We’ve seen servos turned into linear actuators in the past but [Giovanni]’s method yields a power boost thanks to the new motor, and manages to have an outward resemblance similar to most other linear actuators.

















Interesting application of a servo and 3D printer. Worm geared version maybe? Now waiting for a pneumatic and hydraulic version that is 3D printed. Neato!
That is very neat .
Does it have power off absolute positioning?
Within the limits of the accuracy of the potentiometer, yes.
potentiometer is on the wrong moving bit, wont account for the gear backlash
Using the control arm and a push rod was just too simple, I guess?
Comprehensive reading is too hard, we guess?
Reminds me of the actuators in a kit my brother tried using to add a remote lock to his car. Didn’t know they existed until I saw the ones he got.
https://www.amazon.com/InstallGear-Universal-Power-Actuators-12-Volt/dp/B00CZBQCR2/
They are solenoids.
nope, motors and gears. They’re much bigger than they look in the picture. No positioning on those though.
+1
Yep. Fairly cheap 12v brushed motors, gears, and a rack/pinion. No worm drive and a moderate gear ratio so they can be back driven. The motors are small enough/stall current is low enough that they just let them hit the slightly springy endstops full power (and then hope that you shut them off before they burn up).
Fairly useful little motors though.