Flight time remains the Achilles’ heel of electric multi-rotor drones, with even high-end commercial units struggling to stay airborne for an hour. Enter Modovolo, a startup that’s shattered this limitation with their modular drone system achieving flights exceeding two hours.
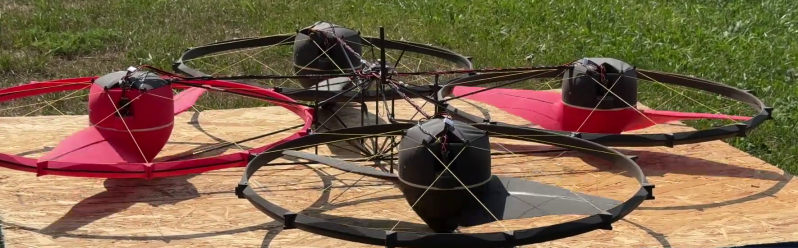
The secret? Lightweight modular “lift pods” inspired by bicycle wheels using tensioned lines similar to spokes. The lines suspend the hub and rotor within a duct. It’s all much lighter than of traditional rigid framing. The pods can be configured into quad-, hex-, or octocopter arrangements, featuring large 671 mm propellers. Despite their size, the quad configuration weighs a mere 3.5 kg with batteries installed. From the demo-day video, it appears the frame, hub, and propeller are all FDM 3D printed. The internal structure of the propeller looks very similar to other 3D-printed RC aircraft.
The propulsion system operates at just 1000 RPM – far slower than conventional drones. The custom propellers feature internal ring gears driven by small brushless motors through a ~20:1 reduction. This design allows each motor to hover at a mere 60 W, enabling the use of high-density lithium-ion cells typically unsuitable for drone applications. The rest of the electronics are off-the-shelf, with the flight controller running ArduPilot. Due to the unconventional powertrain and large size, the PID tuning was very challenging.
We like the fact this drone doesn’t require fancy materials or electronics, it just uses existing tech creatively. The combination of extended flight times, rapid charging, and modular construction opens new possibilities for applications like surveying, delivery, and emergency response where endurance is critical.














The video looks a bit odd though. Towards the end where the drone starts to drop down, it looks kinda like a green screen effect with someone bobbing the thing on a fishing line.
It’s absolutely going to bob, as it’s hyper optimised for flight time and it’s dynamic thrust response is miniscule compared to a conventional drone, especially when it’s right at the very limit of it’s battery capacity.
If they were really dangling it from a fishing line they’d actually have a hard time producing this sort of motion, because they’d be actively trying to hide the fact that it was on a line. Oh, and its vertical axis would be consistently pointing towards the point the line was suspended from, rather than precessing about randomly as it is here.
It would be interesting to see more of this project a bit further down the line when they can evidence how payloads, cameras etc will work, and the effect that weight will have on battery life. Until then however, as they are asking $6000 for a bare 4 rotor platform, I can’t see high end commercial operators who it must be aimed at, rushing to leave a deposit.
Not quite budget frienly…. $6k for a quad configuration.
It’s very interesting but I question it’s usefulness for surveying or similar non-research missions. In particular I have concerns about performance if wind picks up at a distance. It’s highly optimized for energy efficiency and likely lacks the power to get home in even moderate winds. I also wonder if the figures are from flight in ground effect.
The video states that the test flight was made in 15-knot winds, and they’re clearly flying outside the ground effect zone.
Great engineering but as mentioned above, without a payload capacity it’s just demonstration.
It would be fun to have a contest, like the solar car race across Australia (is that still a thing?) but with a mandatory payload weight.
Even with just a tiny cellphone-type camera it could be pretty valuable with that kind of longevity
Yeah hastily cobbled-together drones fastened with baling wire versus MIRVs. Great, can’t wait to see what percentage of their young men survive for the sake of Victoria Nuland
Hastily cobbled-together? This is showing off a prototype of their product.
The construction does not look strong or durable. Maybe it’ll be fine? But I doubt the weight lifting capacity will be very high
Now I want to see a version that combines this with the toroidal wing. https://hackaday.com/2023/01/28/toroidal-propellers-make-drones-less-annoying/
Whups… brain fart… toroidal propeller.
I mean, propellers are really just wings that spin around an axis.
Is it now normal to write 40k mA for battery capacity? Seems a bit pointless. Very cool to get that flight time. Wonder what load it could carry for an hour, As would be useful for emergency/ rescue stuff
this is what happens when Americans use SI prefixes :D
We’ll never know if the “k” in 40k mA is meant to be 1000x or 1024x …
“40k mA”
Marketing department?
If you mean why use thousands of mA-h instead of just A-h, it’s a holdover from the times when phone batteries were smaller. Larger ones like backup power systems are rated in A-h.
It’s kinda human nature to recognize a measurement range and keep using it. People routinely talk about 0.1uF capacitors, or even 0.01uF, cars are inevitably sold as having 97,500km on them
People asking about payload, etc. are missing the whole point. The hack here is that the frame is far lighter than frames of similar size and strength built conventionally. (And it’s no great secret how this works; look up “tensegrity.” Buckminster Fuller is smiling at this.) This makes it possible to use batteries that are more energy dense but not capable of the peak loads demanded by heavier frames. That’s pretty much the story. Payloads are going to have the same effect they would have on anything. Get it out of the comfort zone for the low peak batteries, you lose that advantage. Ask it to carry an adult rhinoceros, it’s not going to matter how light the frame is. This thing would really shine for spy applications where the cameras and sensors are already miniaturized to the point of being pencil dots. For delivering your Amazon order, not as much.
I’ve brought this up before. Piano wire or more likely harpsichord wire size. It certainly can handle the tension but it rusts. In this use it’d be nearly invisible.
Why bother with wire? Just use something like Spectra or Dyneema. But it actually looks like plain old Kevlar in the photos.
The other big deal here is that the batteries are in each pod, reducing the amount of heavy copper wiring.
This makes sense for hover applications where all corners do roughly equal work over time. It might not be so great for distance flight where the motor load is slightly different depending on direction of travel. (Perhaps do half the flight facing one way and then flip around?)
Combine with rotating drone with wing and you have 4 hours
Two words:
TERRAVIEW RANGEPRO
Nearly a decade ago, there was the Vantage Robotics ‘Snap’, which also used tensegrity fan shrouds and motor hub suspension: https://fstoppers.com/originals/hands-pre-production-vantage-robotics-snap-drone-one-i-wish-i-always-had-86658