
In Dune, the Fremen people of Arrakis practice an odd future hybrid religion called “zensunni.” This adds an extra layer of meaning to the title of [Mark Rehorst]’s Arrakis 3.0 sand table, given that the inspiration for the robotic sand table seems to be Zen gardens from Japan.
The dunes on the tabletop version of Arrakis owe nothing to sand worms, but are instead created a rolling metal ball. With all workings happening below, it looks quite magical to the uninitiated, but of course it’s not magic: it’s magnets. Just beneath the tabletop and its sands, the steel ball is being dragged along by the magnetic field of a powerful neodynium magnet.
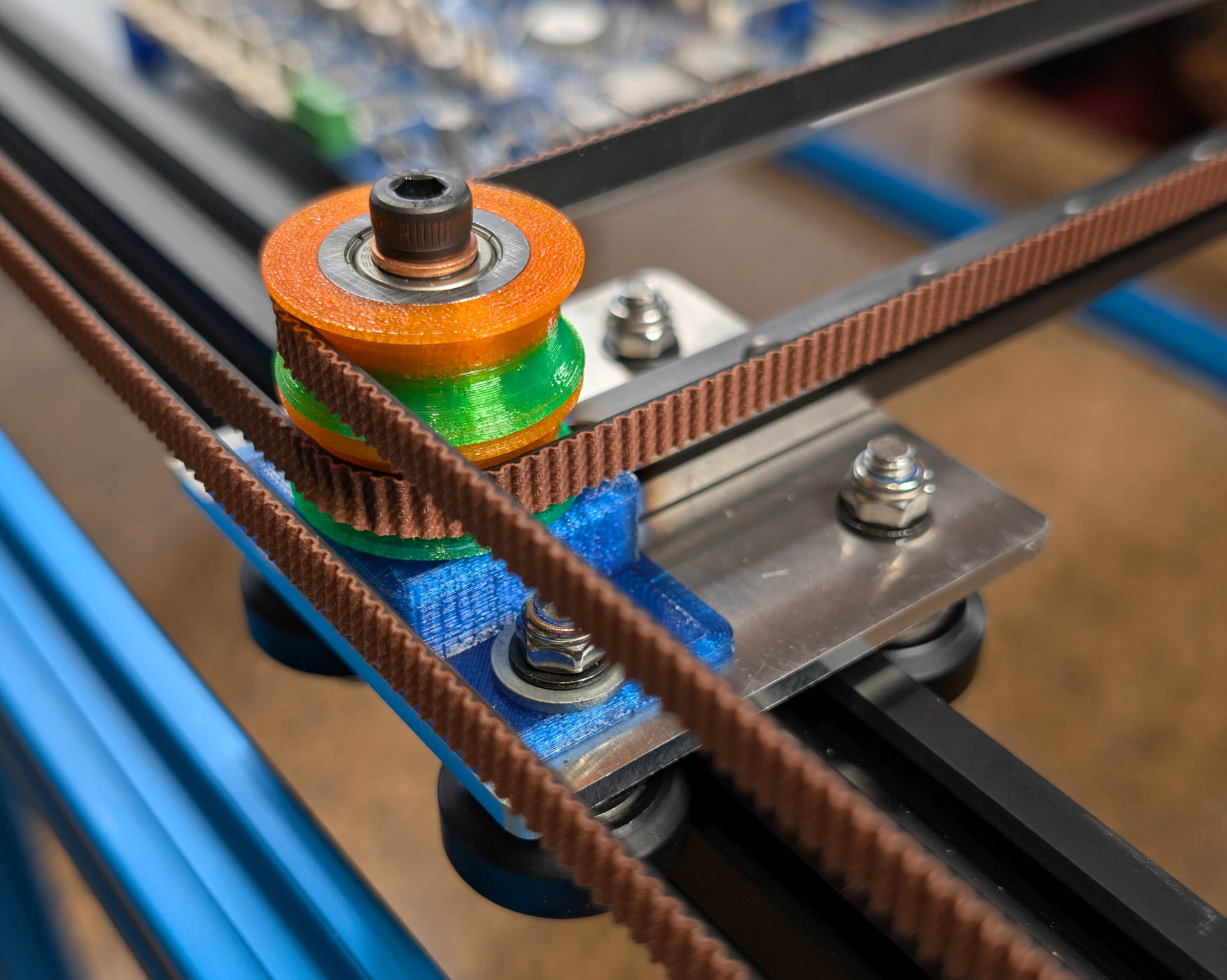 That magnet is mounted in a CoreXY motion system that owes more than a little bit to modern 3D printers. Aside from the geometry, it’s using the standard G6 belt we see so often, along with a Duet3D mainboard, NEMA 17 steppers, and many 3D printed parts to hold its aluminum extrusions together. Thanks to that printer-inspired motion system, the ball can whirl around at 2000 mm/s, though [Mark] prefers to run slower: the demo video below shows operation at 1000 mm/s before the sand has been added.
That magnet is mounted in a CoreXY motion system that owes more than a little bit to modern 3D printers. Aside from the geometry, it’s using the standard G6 belt we see so often, along with a Duet3D mainboard, NEMA 17 steppers, and many 3D printed parts to hold its aluminum extrusions together. Thanks to that printer-inspired motion system, the ball can whirl around at 2000 mm/s, though [Mark] prefers to run slower: the demo video below shows operation at 1000 mm/s before the sand has been added.
This build was designed for ease of construction and movement: sized at 2’x4′ (about 61 cm x 122 cm), it fits through doors and fits an off-the-shelf slab of coffee table glass, something that [Mark] wishes he’d considered when building version two. That’s the nice thing about jumping in on a project someone’s been iterating for a while: you’ve got the benefit of learning from their mistakes. You can see the roots of this design, and what has changed, from the one he showed us in 2020.
Naturally you’re not limited to CoreXY for a sand table, though it is increasingly popular — we’ve seen examples with polar mechanisms and even a SCARA arm.














Lot of videos are so obsessed with process of creating and do not show the final effect or functionality. And apps and programs are missing description of their functionality.
I thought the internet had established long ago that “show the finished item first” was rule #1, seemingly the people (and HaD) have forgotten the rules.
Lots of commenters are so obsessed with seeing the finished project that they can’t appreciate seeing a step along the way.
Where’s the sand?
I too can’t see a video with it actually working with sand..
Here a video with sand https://www.youtube.com/watch?v=7FFaSVFafOk
Even at 200 mm/sec it doesn’t feel Zen-like and it’s beginning to damage my calm.
Since that’s from 3 years ago, i’m guessing that’s probably Arakis 2.0
Is it a sand-free sand table?
WHERE’S THE REPORT COMMENT BUTTON THEN, HACKADAY MODS?
This is an advert, where is the Report button?
If people would stop complaining about the REPORT button, maybe we could have nice things. Like the ability to get this comment removed…
This site is much better without it.
I don’t complain about the report button.
But I DO complain about the missing reply button when the thread has “too many” levels
Magnets ARE Magic!
The video that someone linked above was from a previous table, not this one. I’ll try to post a video later today, but I’m having shoulder surgery in an hour, so it might be a couple days.
As for the”Zen” aspect… Most people build these tables using stepper motors because stepper motors are cheap, or they don’t know about servomotors. Steppers can’t go fast because they lose torque and get noisy at higher speeds. So people excuse their table’s inability to go fast by saying some crap about “zen” .
My tables can go slow if I want them to, but they can also go very fast. Arrakis 3.0 can move the ball at 2000 mm/sec. I’ve seen my tables running slow and fast as have many other people and the universal preference is fast. No one wants to watch the ball crawl along at 50 mm/sec.
Patterns are generated by sandify. Sandify can only assign one speed to the patterns, and for slow tables, that’s fine. I wrote a post processor on perl that assigns two speeds, typically a high speed for the edge motion and a slower speed for the drawings. I have found that at speeds over 500 mm/sec the ball tends to throw the sand around and obscure details in the patterns, so I typically keep the drawing speed down around 200 mm/sec. I usually set the edge motion to 500-1000 mm/sec.
Yes please, I’d love to see it in action with sand.
And yeah, 2kmm/s sounds like a recipe for sand everywhere though if you don’t mind i would love to see it.
Your BOM says you’re using a “stepper servomotor” — it looks like a NEMA 17 stepper with a control board attached. Can you explain how it’s different from a typical stepper?
The motors are integrated servomotors that have drivers built in. That operate in a closed loop and have 1000 line optical encoders. They take step, direction, and enable signals from the Duet board, so as far as the controller is concerned, they look like steppers. Look up iHSV motors.
These servomotors are capable of rotation at 3k rpm with approximately constant torque which is why the ball can move so fast. Before using servomotors, I used nema23 steppers but couldn’t push them above 500 mm/sec and they were noisy as hell. The servomotors don’t break a sweat at 500 mm/ sec and they are quiet.
More here: https://drmrehorst.blogspot.com/2025/11/arrakis-30-new-sand-table.html
Here’s a video: https://www.youtube.com/watch?v=Ks4atRlnSN0
That’s really cool!
Thanks for the follow-up. Looks awesome!