If you wanted to build a robot that chased light, you might start thinking about Raspberry Pis, cameras, and off-the-shelf computer vision systems. However, it needn’t be so complex. [Ed] of [Death and the Penguin] demonstrates this ably with a simple robot that finds the light the old-fashioned way.
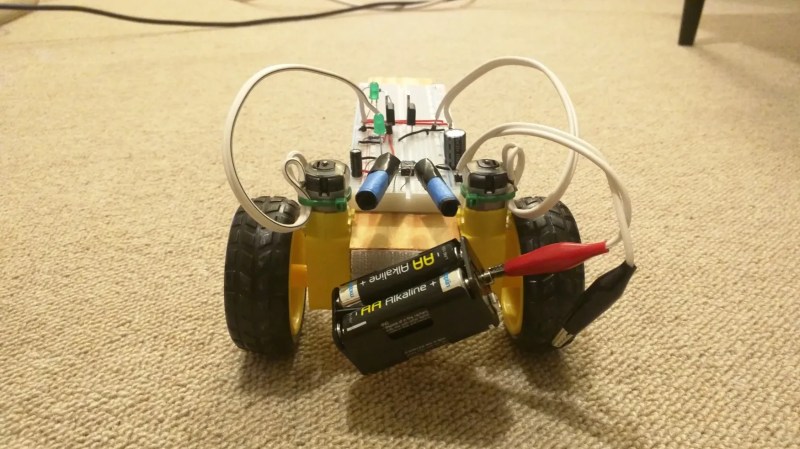
The build is not dissimilar from many line-following and line chasing robots that graced the pages of electronics magazines 50 years ago or more. The basic circuit relies on a pair of light-dependent resistors (LDR), which are wrapped in cardboard tubes to effectively make their response highly directional. An op-amp is used to compare the resistance of each LDR. It then crudely steers the robot towards the brighter light between turning one motor hard on or the other, operating in a skid-steer style arrangement.
[Ed] then proceeded to improve the design further with the addition of a 555 timer IC. It’s set up to enable PWM-like control, allowing one motor to run at a lower speed than the other depending on the ratio between the light sensors. This provides much smoother steering than the hard-on, hard-off control of the simpler circuit. [Ed] notes that this is about the point where he would typically reach for a microcontroller if he hoped to add any additional sophistication.
In an era where microcontrollers seem to be the solution to everything, it’s nice to remember that sometimes you can complete a project without using a processor or any code at all. Video after the break.














Welcome to B.E.A.M, folks
How about one that follows smell?
This sounds a lot like a Braitenburg vehicle.
Braitenburg vehicles can appear goal oriented. With a simple configuration of sensor and motors (each sensor controls a motor on the opposite side), you can make a vehicle that avoids light and will scurry away and hide under the couch… much like a cockroach would do.
I remember reading about the housefly motion vision processing system having only 300 neurons (out of about 100,000 total). A few hundred neurons can compute visual motion in real time.
https://en.wikipedia.org/wiki/Braitenberg_vehicle
This is cute and I want to pet it.
If I’m going to be honest, I think the first version without the PWM control is cuter
https://www.youtube.com/watch?v=Psjj_7DbDAw&t=8s
What’s sad is that in TodayWorld, this is impressive. How far we have fallen…
I do like discreet logic circuits, always did.
Especially electro-mechanical relays. There’s a certain fascination about it.
Programming a pre-manufactured microcontroller is no big deal, everyone can do it.
But building a primitive battery, light bulb, relay, resistor, electro motor or crystal radio from scratch is different.
By building something that way, you actually accomplish something with your bare hands.
It’s your own, personal creation. It’s satisfying, brings inner peace.
That’s important especially to men, probably, who like to create.
There’s that saying that every man should have planted a tree at least once in life.
Also, it’s something, a skill, that can’t be taken away from you.
Knowledge about basic components will always remain relevant.
Even if you can’t certain buy parts anymore, because they are obsolete, you can still build them from scratch if you really want to. 🙂
That’s not analogue!
Here’s a one transistor version. Yes, a single transistor.
http://cyberneticzoo.com/wp-content/uploads/2011/08/Emily-Popular-Electronics-Mar-1962.pdf
Shows what skill and imagination can achieve!
Here’s an earlier variant using valves
https://nsaxonanderson.wordpress.com/2012/03/08/grey-walters-anticipatory-tortoises-by-margaret-boden/
https://www.futurelearn.com/info/courses/robotics-with-raspberry-pi/0/steps/75898
https://hackaday.com/tag/line-follower/
That’s not analogue!
Here’s one from 1962 using a single transistor. Yes, one transistor
http://cyberneticzoo.com/wp-content/uploads/2011/08/Emily-Popular-Electronics-Mar-1962.pdf
Earlier 1950s variants used valves; search for “Grey Walter”.
Shows what can be achieved with skill and imagination :)
It’s definitely analogue, as much so as the older one. The brains of it is a very cheap analogue op-amp. The older one uses a relay, which has a very much binary output. Version one is very similar in that regard. Main difference being that mine uses a pair of sensors differentially making it somewhat insensitive to ambient light. This is obviously much easier with an opamp than a first generation transistor!
The main point of the project was really the black-tube-and-LDR direction sensor. I wanted to see how sensitive of a direction sensor I could make with some simple hacks.
So much “digital” is just reproduced analog effects, to differing degrees of fidelity.
Good start! Anyone got any links to stanag 3733 compatible seeker circuits?