The last decade or so has seen remarkable advances in motor technology for robotics and hobby applications. We’re no longer stuck with crappy brushed motors, and now we have fancy (and cheap!) stepper motors, brushless motors for drones, and servo motors. This has led to some incredible achievements; drones are only barely possible with brushed motors, and you can’t build a robot without encoders.
For his entry into the Hackaday Prize, [Gabrael Levine] is taking on one of the hardest robotics challenges around: the bipedal robot. It’s a chickenwalker, or an AT-ST; either way, you need a lot of power in a very small space, and that’s where the OpenTorque Actuator comes in. It’s a quasi-direct-drive motor that was originally pioneered by the MIT Biomimetics Lab.
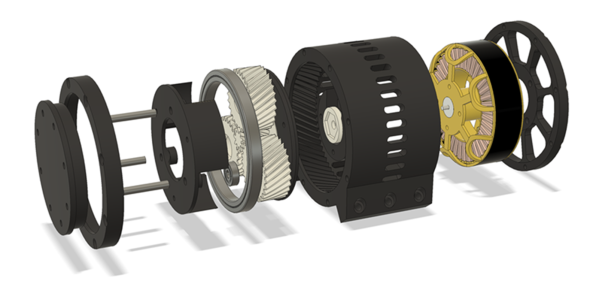
The key feature of the OpenTorque Actuator is using a big brushless motor, a rotation encoder, and a small, 8:1 planetary gear set. This allows the motor to be backdrivable, capable of force-sensing and open-loop control, and because this actuator is 3D printed, it’s really cheap to produce.
But a motor without a chassis is nothing, and that’s where the Blackbird Bipedal Robot comes in. In keeping with best practices of robotic design, the kinematics are first being tested in simulation, with the mechanical build happening in parallel. That means there’s some great videos of this chickenwalker strutting around (available below), and so far, everything looks great. This bipedal robot can turn, walk, yaw, and work is continuing on the efforts to get this bird-legged bot to stand still.









