The last decade or so has seen remarkable advances in motor technology for robotics and hobby applications. We’re no longer stuck with crappy brushed motors, and now we have fancy (and cheap!) stepper motors, brushless motors for drones, and servo motors. This has led to some incredible achievements; drones are only barely possible with brushed motors, and you can’t build a robot without encoders.
For his entry into the Hackaday Prize, [Gabrael Levine] is taking on one of the hardest robotics challenges around: the bipedal robot. It’s a chickenwalker, or an AT-ST; either way, you need a lot of power in a very small space, and that’s where the OpenTorque Actuator comes in. It’s a quasi-direct-drive motor that was originally pioneered by the MIT Biomimetics Lab.
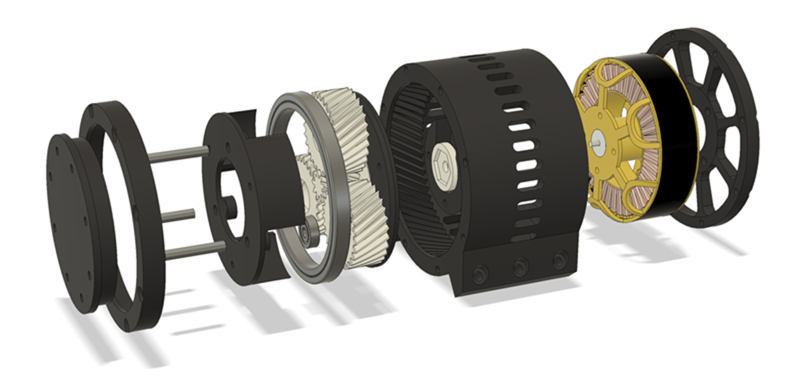
The key feature of the OpenTorque Actuator is using a big brushless motor, a rotation encoder, and a small, 8:1 planetary gear set. This allows the motor to be backdrivable, capable of force-sensing and open-loop control, and because this actuator is 3D printed, it’s really cheap to produce.
But a motor without a chassis is nothing, and that’s where the Blackbird Bipedal Robot comes in. In keeping with best practices of robotic design, the kinematics are first being tested in simulation, with the mechanical build happening in parallel. That means there’s some great videos of this chickenwalker strutting around (available below), and so far, everything looks great. This bipedal robot can turn, walk, yaw, and work is continuing on the efforts to get this bird-legged bot to stand still.













Would it taste good on a BBQ?
Maybe not. Awesome work though!
Depending on which one you get, it might be a little Chewie inside.
I see what you did there.
I cook my Tauntaun until it’s Luke warm.
Might be too greasy
Electric motor with planetary gear? Ok.
Why scientists working on bi-pedal (or any other replication of human/animal way of movement) using traditional electric motors anyway? It seems that nature designed living organisms this way because it is the most efficient arrangement that can be achieved with available type of actuator – muscle. Unless humanity invents an actuator with characteristics similar to how a muscle works all these efforts seem to be a waste of time. Yes – there are also rack/pinion, worm drive or screw drive mechanisms. Each with its set of pros and cons. And that still can’t replicate the nature lacking either in speed or power output. Boston Dynamics seems mostly using hydraulics. Also it worth looking at “Soft Robotics Inc” – that is a lot different approach to how an energy can be transformed into a movement.
“Why scientists working on bi-pedal (or any other replication of human/animal way of movement) using traditional electric motors anyway? ”
So, “we” (the Royal we) should just sit around until the muscle actuator appears out of nowhere to solve our mobility problems, and stop wasting our time with anything less than the perfect solution?
To your point, there’s a huge benefit of hydraulics over electric motors: in a static configuration (not moving), hydraulic actuation uses essentially 0 power. Electric motors like this require constant amperage to resist backdriving. Of course, there are always ways around that; using strain wave drives, elastic support structures like on Agility Robotics’ Cassie bot, ensuring static configurations always transmit weight along the axis of gravity, etc.
The scientific/engineering community generally agrees that artificial muscles would be the best solution for legged dynamic robots, and motor/hydraulic control design is usually done such that it mimics the properties of muscles. The reason that roboticists aren’t using them for legged robots is because artificial muscles aren’t really ready for that application yet. While they are commercially available (see https://www.festo.com/us/en/p/fluidic-muscle-id_DMSP/?q=~:relevance), muscles are still too weak or run on compressed air so won’t cut it for running robots. Even without using muscles though, you can see that legged robots using these kinds of motors or hydraulics have gotten close to animal performance in various aspects (the MIT Cheetah motors are more powerful than muscles, and the Cassie robot from agility robotics walks with a similar energy cost to bipedal animals).
If your question was less about the choice of actuator and more on why legged robots in the first place, the answer is because for the most part we’ve designed our world for people with legs. There’s also complicated natural terrain, but for the most part legged robots are going to be used for going up and down stairs. Up until this point legs, even with their pitfalls, have been demonstrated as the best method of terrestrial locomotion for dealing with a wide variety of obstacles.
“you can see that legged robots using these kinds of motors or hydraulics have gotten close to animal performance in various aspects ”
Such as…
https://blog.machinefinder.com/3255/john-deere-walking-harvester
I believe you get it wrong. I’m a huge fan of biomimetism, looking at nature to get ideas very often gives you an insight in what would be a good way to handle a situation. But, you have too look at the context:
In this case, nature had to make with what was available, and a majority is carbon, which gave us our carbon life form. Which then can iduce why muscles, and not something else.
Second, the motor used has a power of somewhere around 3000W (follow the link, to the github, BOM and then you have an alibaba link). Just let that sink in. 3kW of power. With a >90% efficiency. A human power cyclist can barely get to 1000w, and if he gets above that, he’s probably a professional and can only hold this for a small moment (FYI a flesh muscle has 20% of efficiency). This isn’t the case with an electric motor, it will run as long as you give him energy (well you could say the same with a muscle…). In fact I would say this is the whole point, it has access to a whole other power source, which allow better efficiency and of course more power.
Third, I don’t expect my robot to reconstruct itself when it’s damaged (or well, we’re doomed). The robot will evolve in a another ecosystem than any animal.
So yes, if you want to make a robot that can behave like an animal in an environnement like nature and having the same advantages (behing able to sustain itself + auto repair), flesh muscle are probably the way to go. Otherwise, other solution can be more effective for a more specific job or environnement!
PS: sorry for the mistakes, english isn’t my mother tongue
That motor does not have 3000 Watts of output power. It has a theoretical peak output torque of 80 Nm but with the current limited to 60 Amps to stop it from melting, the torque is limited to 28 Nm which means the motor should be spinning at 107 rad/s (1021 RPM) to achieve 3 kW of output power.
However, with a reduction gear of 8:1 that means the BLDC motor should be spinning at 8200 RPM. This means the drive frequency is up so high that the coil impedance won’t pass the required current any longer and the motor can’t maintain the torque.
This motor is made for high torque and low speed operation, which means its efficiency is not anywhere near 90%. It’s spending most of the time acting as an electric heater to provide holding torque.
The design speed for the motor core is 5600rpm at 48 Volts and the maximum input power is around 3 kW. In reality though, the motor can sustain 4.95 Nm of torque, multiplied by 8, minus friction losses, results in about 28 Nm which means 71% efficiency for torque for the drivetrain.
The energy efficiency is a different matter and depends on whether the motor is turning at the moment. Without motion, no work is being done, so efficiency is zero. This motor is going to turn at some very low RPM relative to the nominal output speed (700 RPM after the gears) which means the efficiency is going to be very low – in the low 10% range.
Good points, didn’t ran the numbers but I still maintain that, in a broader picture, if the author isn’t using the motor at it’s nominal performance that is another problem that isn’t responding to the first question, we know how to make something more efficient than nature for a very specific job and another environnement, that’s why we are still using electric motors.
But you are right, I didn’t though about the fact that the motor won’t work at all iat his nominal performance!
>if the author isn’t using the motor at it’s nominal performance that is another problem that isn’t responding to the first question
No, it’s exactly the issue at hand. This is the trade-off you have when you use an electric motor for this particular job. You get high efficiency only with a motor that trades torque for speed, but then you must use a high gear reduction ratio and that means you can’t back-drive the mechanism anymore. It also means your motor has high inertia (large changes in RPM and angular momentum) which makes it slow to change direction. If you want efficiency, the robot becomes slow and clumsy.
Efficient or dynamic – you can’t have both.
This motor isn’t made for high torque and low speed because they reused a motor for UAV. MIT custom motor for cheetah robot has a half resistance then the previus one that has at walking pace an efficiency about 25% (50% the custom motor at same condition). Yes it is a matter of armature resistance. MIT team developed a new 8 phase motor (with higher slot number, the previus has 81 slot and one slot for pole) with a peak torque density about 40-45 Nm/kg (without the casing and the gear reducer). Sure a great and interesting achievement but at this point a radial machine is almost at its pratical limit. For an axial machine is another story, torque scale with the cubic of radius instead the square. With a double rotor configuration we can have two “active surface” and so higher saturation limit. The most interesting configuration is the one created by magnax. Yokeless axial machine with a filling factor of 90% (concentrated winding so no copper in “excess”) and an efficient aluminum heat sink. In this case is possibile to have a sufficient lower resistance for high efficency and significant higher torque density….
The main disadvantage of using gear motors for robotics is that you get a fast spinning flywheel that has to change direction or stop/start rapidly. The energy stored in the rotor goes up in the square of its speed, so the motor will spend all its power canceling its own inertia.
Muscles don’t do that.
Last time I checked the Nature was really bad at planetary gears, bearings and generally anything rotating. Perhaps it’s because it has additional constraints for materials and the requirement that the thing has to actually grow and work while it is growing. We don’t have such problems, so we can use more advanced machines.
Nature does do fully rotational systems occasionally: the flagella that bacteria use to move, and the core of the enzyme all living things use to make adenosine triphosphate, both are protein structures that spin in one direction continuously. However, proteins make bad bearings. Evolution works with what it has available, and it may be stuck in a local optimum centered around muscles, because in order to get to a (possibly) theoretically superior rotary solution would require many generations of animals that weren’t competitive with the muscle-optimized solutions we have now so it’s not feasible. Evolution doesn’t make good decisions, it just optimizes randomness.
Rotary electric actuators are awesome. For starters they can have incredible power to weight ratios. Consider that most hobby brushless motors can lift themselves and some batteries off the ground. In some cases quite fast as this video illustrates: https://www.youtube.com/watch?v=YHvC3KRTxO0. Another is that electrical motors are quite efficient with efficiencies above 90% possible. Muscles only achieve 18-26% efficiency, although this is somewhat unfair because muscles go from chemical energy to work(https://en.wikipedia.org/wiki/Muscle#Efficiency). Rotary electric actuators are quite reliable with robot arms based on rotary electric actuators achieving mean times between failure of 100,000 hours or more. That’s more than 10 years of operation! In addition, because we can move electricity around faster than we can say fluid or air we can achieve much finer control. In hydraulics and pneumatics, changes in pressure propagate at the speed of sound, while electricity moves near the speed of light. It is very difficult to do the following with hydraulics or pneumatics: https://www.youtube.com/watch?v=m76NmLypo1I.
In terms of function, it’s possible to do everything muscles can with rotary electric actuators. One big reason for using muscles which pull a joint in either direction is that by contracting both muscles at once we can increase the stiffness and damping of the joint. We call this variable impedance control. There are approaches for doing so using rotary electric actuators, some of which have even been featured here on hackaday:https://hackaday.com/2016/02/25/variable-stiffness-joints-for-robots-and-more/. In addition, it is even advantageous to use purely rotary actuators rather than using linear actuators to mimic muscle. A rotary joint can be stiffer than using a linear actuator to create rotary motion because there’s more material which can deform. It is desirable for robots to be as stiff as possible so that they don’t wobble around as much, which enables them to carry out precise motions faster.
Yes, the torque density of rotary electric actuators could be improved. The power density of rotary electric actuators is greater than muscle, but we obtain high power at high rpm with low torque. This could be improved with better transmissions and gearboxes. Cooling is another way we can increase torque density. We can get more torque out if we apply a higher current to our motors, but this tends to cause our motors to heat up, which increases resistance, causing more heat, and eventually thermal runaway(fire or melting). By cooling our motors we can avoid this. A large part of why Schaft won the first DARPA robotics challenge was because they came up with a way to cool motors allowing them to produce more torque.
I would also like to point out that hydraulics and pneumatics are a form of transmission. They do not actuate on their own, some actuator elsewhere creates fluid pressure to move them.
>This could be improved with better transmissions and gearboxes.
That’s a pretty tall order, because the transmission must be a) backdriveable, b) high ratio, c) fast acting
If you have a fixed ratio gearbox you always compromise between speed and torque. You can’t have both at the same time. When you increase torque by increasing the gear ratio, you can’t back-drive the gears any longer and the mechanism isn’t compliant anymore. When your robot stomps down, its joints won’t give and the shock on the transmission strips the gears.
To get around that, you have to implement some sort of variable ratio mechanism with slipping clutches etc., which is mechanically complex and loses efficiency, or you can just bite the bullet and pump a lot of current at low efficiency through a direct-drive BLDC motor.
Motor shmotor.
What I want a chicken walker for is to make the battery pack in an electric car mobile, so it can exit the car and go swap itself or walk over to a charger set up in my apartment.
Could you imagine motorized walking battery packs for EV vehicles that are parked in areas where there are no EV charging stations.
Genius, not totally sure it’s practical, but genius.
TBH I would want a P-5000 Powered Work Loader first, it could do the same job, it could move the car.
Wait, why not use steppers to resolve the holding torque issue?
Large holding torque and back-drive-ability appear to be competing requirements for electric actuators. Perhaps active compliance using force feedback can be employed instead of back-drive-able actuators.
It can, but the speed of the motor limits you again. If the motor doesn’t respond fast enough (has too much inertia), your gear train will lock up with friction.
Suppose your rotor diameter is 50 mm and the mass is 100 grams distributed around the diameter (the magnet ring), when the motor is spinning at 10,000 RPM it stores 34 Joules of energy in the momentum of the wheel. Even so, you might have a 100:1 reduction gear for the output so your actuator is rotating at a leisurely 100 RPM.
If you want to reverse the motion of the actuator in 100 milliseconds, you have to brake the motor and gain energy in the opposite direction, which means you have to input 68 Joules of energy in 1/10th of a second which means you need to push 680 W into the motor. You’re fighting the inertia of the motor all the way just to make it start and stop in time.