Almost by definition, the coolest technology and bleeding-edge research is locked away in universities. While this is great for post-docs and their grant-writing abilities, it’s not the best system for people who want to use this technology. A few years ago, and many times since then, we’ve seen a bit of research that turned a Kinect into a 3D mapping camera for extremely large areas. This is the future of VR, but a proper distribution has been held up by licenses and a general IP rights rigamarole. Now, the source for this technology, Kintinuous and ElasticFusion, are available on Github, free for everyone to (non-commercially) use.
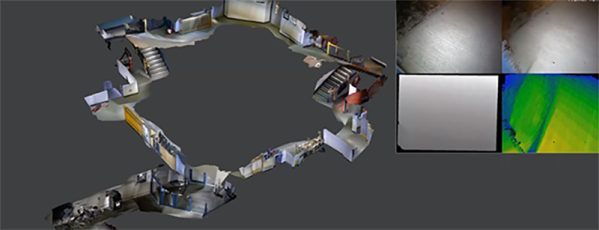
We’ve seen Kintinuous a few times before – first in 2012 where the possibilities for mapping large areas with a Kinect were shown off, then an improvement that mapped a 300 meter long path though a building. With the introduction of the Oculus Rift, inhabiting these virtual scanned spaces became even cooler. If there’s a future in virtual reality, we’re need a way to capture real life and make it digital. So far, this is the only software stack that does it on a large scale
If you’re thinking about using a Raspberry Pi to take Kintinuous on the road, you might want to look at the hardware requirements. A very fast Nvidia GPU and a fast CPU are required for good results. You also won’t be able to use it with robots running ROS; these bits of software simply don’t work together. Still, we now have the source for Kintinuous and ElasticFusion, and I’m sure more than a few people are interested in improving the code and bringing it to other systems.
You can check out a few videos of ElasticFusion and Kintinuous below.