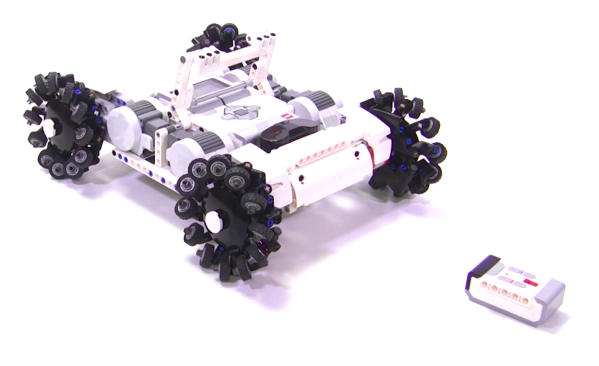
Mechanum wheels are great, but you have to have them perfectly alined or they come across a little clunky, giving your robot a herky-jerky movement. Robotics educator and supreme LEGO builder [Yoshihito Isogawa] built a mechanum-wheeled rover that has the angles right: each wheel consists of 12 smaller rubber tires angled at 45 degrees. The key to the project is Part Number 85940, accurately if unsexily named “double Ø4.85 hole w/ Ø3.2 shaft”. It consists of a double technic hole with a shaft projecting in a 45-degree angle.
Unlike his omni-roller project with 3 large wheels and the mechanum tank treads he built for another project, this one features the gold standard of mechanum movement: creepy agility. He also did a version with 9 side rollers per wheel, and it was nearly as stable.
Hackaday loves [Yoshihito]’s great creations, which are as beautiful and elegant as they are functional. His all-LEGO centrifugal pump and his spirograph machine make expert use of parts to make the builds as simple as possible.
Continue reading “Freakishly Agile Crawler Rocks All-LEGO Mechanum Wheels”









