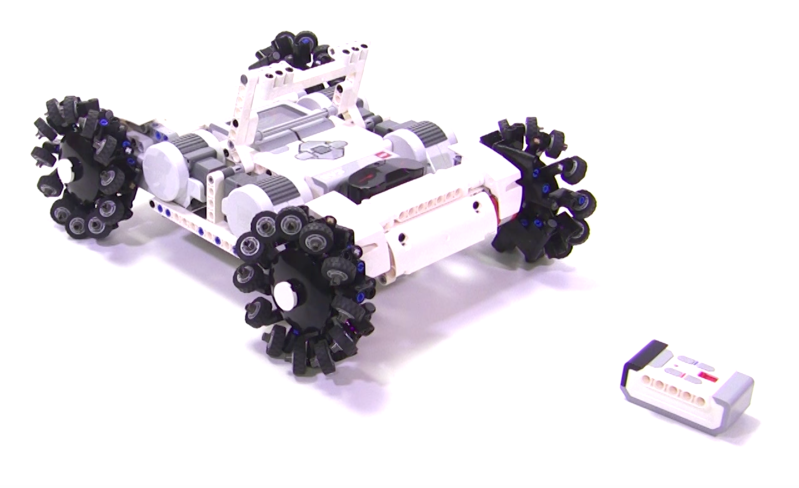
Mechanum wheels are great, but you have to have them perfectly alined or they come across a little clunky, giving your robot a herky-jerky movement. Robotics educator and supreme LEGO builder [Yoshihito Isogawa] built a mechanum-wheeled rover that has the angles right: each wheel consists of 12 smaller rubber tires angled at 45 degrees. The key to the project is Part Number 85940, accurately if unsexily named “double Ø4.85 hole w/ Ø3.2 shaft”. It consists of a double technic hole with a shaft projecting in a 45-degree angle.
Unlike his omni-roller project with 3 large wheels and the mechanum tank treads he built for another project, this one features the gold standard of mechanum movement: creepy agility. He also did a version with 9 side rollers per wheel, and it was nearly as stable.
Hackaday loves [Yoshihito]’s great creations, which are as beautiful and elegant as they are functional. His all-LEGO centrifugal pump and his spirograph machine make expert use of parts to make the builds as simple as possible.














Does it still work on a grippy floor?
It should, as the mode is essentially pure rolling contact. The compliance of the tyres should compensate for the ‘essentially’ in rolling contact
They work best on a grippy floor. In a conventional tire contacting the ground there are 3 degrees of freedom that are constrained = one is fore-aft which has it’s motion controlled by torque (if any) supplied by the axle. The second is side-to-side and the third is twist.
This eliminates one degree of freedom by adding the no-torque resistance peripheral axles, which is why it can also go sideways, so it has no greater problem with high-traction surfaces than a conventional tire. I think these wheels have lower traction because of that additional degree of freedom.
[img]https://goo.gl/images/8JJwOI[/img]
Doh .. no way to edit, ni way to delete .. maybe pointy tags rather than normal bbcode?
https://goo.gl/images/8JJwOI
This is AWESOME. Ordering a ton of that weird Technic piece right now.
Heh… last time I tried doing that, I did so by rotating each entire wheel.
I’ll point out though the vehicle in question was a harvester (about the size of a typical bus) with 20kW motors (@48V… so 400A) in each hub. We would have had it working too if the MOSFETs driving the steering motors didn’t keep blowing up. I might have some video of it going… was looking around for a video of the prototype that was done ~2007-2008. Google Search for “SmartWheel” (the now defunct company that did it) doesn’t give me any joy… seems someone else is using that name for a different product now.
Not sure if this method would scale to a wheel that stands about 1.5m tall, but I admire the agility of this model.
Found it:
https://www.youtube.com/watch?v=yuHKKVpZ6gY
Said harvester gets a mention about 4 minutes in.
Definitely a cool bot.
Just in case people are wondering, Vex sells a nice set of Mecanum wheels for about $60.
Here’s a link to my Hadaday.io page where I use a set.
https://hackaday.io/project/4039-mecanum-wheeled-rover-5
IMO, you want to make sure you have encoder feedback (which the above Lego motors have) in order to properly control a Mecanum wheeled robot.