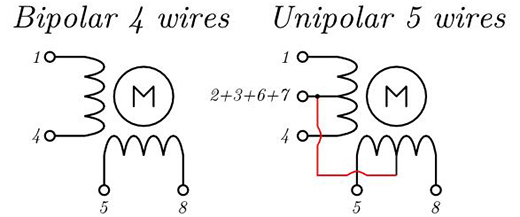
If you’ve been a good little hacker and have been tearing apart old printers like you’re supposed to, you’ve probably run across more than a few stepper motors. These motors come in a variety of flavors, from the four-wire deals you find in 3D printer builds, to motors with five or six wires. Unipolar motors – the ones with more than four wires – are easier to control, but are severely limited in generating torque. Luckily, you can use any unipolar motor as a more efficient bipolar motor with a simple xacto knife modification.
The extra wires in a unipolar motor are taps for each of the coils. Simply ignoring these wires and using the two coils independently makes the motor more efficient at generating torque.
[Jangeox] did a little experiment in taking a unipolar motor, cutting the trace to the coil taps, and measuring the before and after torque. The results are impressive: as a unipolar motor, the motor has about 380 gcm of torque. In bipolar mode, the same motor has 800 gcm of torque. You can check that video out below.









