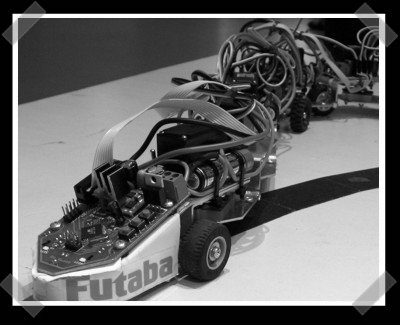
[Lars] sent in this sweet snake robot that he and [Aske] built for the DTU Robocup. I’ve seen snake bots before, but I like the concept and the clean electronic design. They used a single AtMega32 controller to generate PWM signals for each of the eight servos, and used a very interesting DC-DC buck converter that’s capable of delivering 16 amps.
For the curious, the bot won the best design and effects award at the competition.














I was surprised as to how smooth and efficient the motion seemed. Well done.
WOW! Very impressive. Elegant – Using a snaking motion to move forward, with passive wheels. The code must have been interesting! A bit like trying to emulate natures’ design. I wonder how efficient this is compared to using motor-driven wheels.
where did you find a video?
Oh holy crap that was so awesome. Seriously.
same here #2, I always envisioned snake bots as being pretty clunky, though I’d still like to see one move a little faster.
I was just thinking, why doesn’t anyone ever create these things to be daisychainable, it’d be pretty easy to either run all links on one addressed data line, with cheap slaves on each link generating the servo pulses, or better yet, having the links pass possition data down the line from one to another through discrete connections. you gotta admit, it’d be cool to be able to just snap on additional vertibre.
video here: http://pontoppidan.info/lars/index.php?proj=sicksack&page=1
Well deserving best design and effects award :)
Of the two robots that caught my attention the most down there was this snake-bot and “Tumlingen” an inverse pendulum design that actually managed to complete the whole course including going up and down slopes.
Btw, better luck next time with the slopes lars and aske :)
Best regards, Aleksander Toppe
I believe the term you are looking for is either “Open Servo” ( http://www.openservo.com ) or maybe Dynamixel ( http://www.robotis.com/html/sub.php?sub=2&menu=2 )
Hey Lars
I just think’d that the winners of RoboCup’07 (RoseBot) also should say some :D
Very nice and interesting design for the robot, I must say and wauw! The things you guys managed to make with your software over the last night was awesome !!!
Best regards Bjørn Smith
This is tight!
Hey All
Thanks for the comments!
As Bjørn (#10) points out we were quite busy during the last night getting the line following software to work. Checkout the videos from the qualification round here:
http://www.youtube.com/profile?user=dvaske
Not nearly as good as the final runs! ;)
#9 thanks for the links – looks very interesting.
Cool snake robot! The design is very similar to one I made a few years ago, the site is at http://arctangent.8k.com/snake/snakemain.htm
Lars either has reinvented my design independently, or implemented mine very well… in either case it is a very cool robot.
Congrats on your award at the competition.
Hey Mark
Actually we had not seen your snake robot until you posted the link above, but i must say they are very much alike.
Next step for SickSack is getting up that ramp!
/aske