[Doug] and [Kay] have been building a steel 70-foot sailboat for the last few years, and since it’s a little too cold to work outside their home/shop in Oklahoma, they’re bringing their projects inside for the winter. Until it warms up a bit, they’re working on an underwater ROV capable of diving to 3000 feet below the waves, maneuvering on the ocean floor, and sending video and side-scan sonar back to their homebuilt ship.
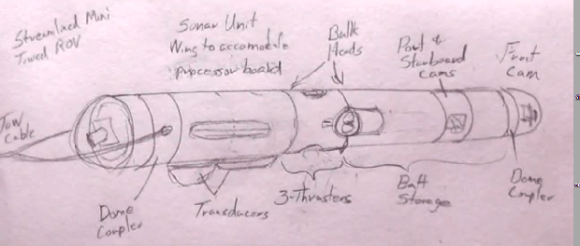
Like [Doug] and [Kay]’s adventures in shipbuilding, they’re documenting the entire build process of ROV construction via YouTube videos. The first video covers the construction of a pressure vessel out of a huge piece of 10″ ID, half inch wall steel pipe. The design of the ROV will look somewhat like a torpedo, towed by the ship with cameras pointing in all directions.
For communication with the surface everything is passing over a single Cat5 cable. They’re using an Ethernet extender that uses a twisted wire pair to bring Ethernet to the ocean bottom. With that, a few IP webcams relay video up to the ship and a simple Arduino setup allows for control of the ships thrusters.
The thrusters? Instead of an expensive custom solution they’re using off the shelf brushless motors for RC cars and planes. By potting the coils of a brushless outrunner motor, [Doug] and [Kay] found this solution makes an awful lot of sense; it’s cheap, fairly reliable, doesn’t require a whole lot of engineering, and most importantly cheap.
Bunch of videos below, or just check out [Doug] and [Kay]’s progress on their slightly out-of-date blog.















From Wikipedia; emphasis mine:
“The title refers to the distance traveled while under the sea and not to a depth, as 20,000 leagues is over eight times the diameter of Earth.”
Definitely watching these later, as ROV subs are cool (the preview frame from the second video is a bit unnerving, though…) Now, I’m going to go find out how much that steel pipe is per foot.
I see what you mean. Hold the knife the other way, kid!
The way he’s wrestling with that thing, it must weigh 300 lbs empty.
Seems like he has the end cap backwards. Can’t see how water won’t push its way in.
What you see there is a bevel on the end cap which is necessary for a very strong weld. Usually called a weld-prep. I imagine it will be fully seam welded by the end.
Sorry, I meant the hatch- the thing he’s playing with at 5:50.
Thats the test chamber. He is going to use that to pressure test the actual ROV, so it needs to hold all of the pressure in, not out.
I think he is building a test chamber here (the large pipe). The ROV will be placed inside, and water pumped IN. Therefore the access hatch needs to seal from the inside out. So, yes, his build is correct.
In another video he shows the pipe for the ROV. It is significantly smaller diameter, and T6.
Oklahoma? The ocean is quite a bit away.. The dreamers can dream.
He’s only 15 miles from the nearest port in Tulsa, on the Arkansas river. He’s going to hire a house mover to move the boat, sans wheel house and masts, to the water.
Doug and Kay are pretty nice folks and they appreciate feedback as long as people aren’t being tools about it. They admit they aren’t experts on most of the stuff they do and that they do listen to and have been guided by feedback before. If you have a question or suggestion, feel free to post a comment on one of their videos I’m sure they’d give it some thought.
Aw man, another half finished project I let sit too long and someone beat me to it.
I’ve been following Doug and Kay for a long time and apart from actually doing what many people only dream about they are such a sweet couple which makes me warm inside whenever I see them working toghether!
I really hope they get their ship ready in the near future because I’d love to see them sitting on a tropical island somewhere just enjoying their hard work!
Watch the episodes when they build the propellers… Even when things goes tits up they still smile about it and just make another attempt until they succeed!
Very skilled people indeed!
I’ve been following these guys too! I loved the part where they cut a part on a CNC machine out of wood, then sand cast it out of metal.
The various oceanographic ROVs use open or oil flooded chambers rather than have the entire thing be a pressure vessel. Not only is pipe rated for 100 atm expensive but it’s also heavy. The thrusters they’ve put on there are going to have a bear of a time maneuvering the ROV around at depth. If they aren’t going to be using PoE the size of their batteries will have to be large to hold enough juice to move their rig around. Also it’s cold 3000ft down, this will affect how all of their hardware runs and they need to plan for that
The guys over at OpenROV might be a good resource for this project. They seem to have a decent sized and knowledgable community built around this sort of thing.
Why bother with CAT5 when 100base-TX to 100base-SX (multimode fiber) converters cost a few bucks on ebay, so does the fiber…
Longer distances, no need to isolate the cable from salt water an when bought in bulk the fiber should be cheaper :D
I was also thinking about this option. A media converter like this (http://uk.tp-link.com/products/details/?categoryid=&model=MC210CS#over) only costs $50. I have not tried it myself but I think optical link is more stable than a copper link for this application. It supports a steady 1Gb link up to 15km.
“The thrusters? Instead of an expensive custom solution they’re using off the shelf brushless motors for RC cars and planes.”
Brilliant guys. I am very much impressed of their creativity and imagination. I’ll be keeping tabs of their progress and how the project turns out.
check out the videos done so far on propeller thrust in a test tank
Awesome design! Love