A lot of the big names in 3D printers were at the Midwest RepRap festival showing off their wares, and one of the biggest was Lulzbot with their fabulous Taz 3 printer. This year, they were showing off a new filament, a new extruder, and tipping us off to a very cool project they’re working on.
The new products Lulzbot is carrying are Ninjaflex filament and the extruder to go with it. Ninjaflex is the stretchiest filament we’ve ever seen, with the feel of a slightly hard silicone rubber. Straight off the spool, the filament will stretch to a little less than twice its original length, and in solid, printed form its a hard yet squishy material that would be perfect for remote control tank treads, toys, and 3D printed resin molds. With all the abuse the sample parts received over the weekend, we’re going to call Ninjaflex effectively indestructible, so long as you don’t try to pull the layers apart.
Also from Lulzbot is word on the new 3D scanner they’re working on. The hardware isn’t finalized yet, but the future device will use a webcam, laser, and turntable to scan an object and turn it directly into an .STL file. Yes, that means there won’t be any point clouds or messing about with Meshlab. Lulzperson [Aeva] is working on the software that subtracts an object from its background and turns it into voxels. The scanner will be low-cost and open source, meaning no matter what the volume of the scanner will be, someone will eventually build a person-sized 3D scanner with the same software.
Videos of [Aeva] below showing off the new stuff and talking about the scanner.














Also worth noting, the development of the scanner is also open to the public. I post updates to the project here on our forums: http://forum.lulzbot.com/viewtopic.php?f=41&t=589 On that thread there are pictures and code from the image processing experiments, and I think some links to relevant projects on our github. Also, I’m simulating the scanner in Blender so as to enable me to work on the software in parallel to the hardware.
I’m curious about the Flexytruder. I’m playing with generic flexible TPE filament in my RepRap with the standard Greg’s Wade’s extruder and J-head hot end. Judging by your squishing of the octopod and the companion cube bounce :D , TPE and Ninjaflex appear to be quite similar materials. Why a separate toolhead for the Taz?
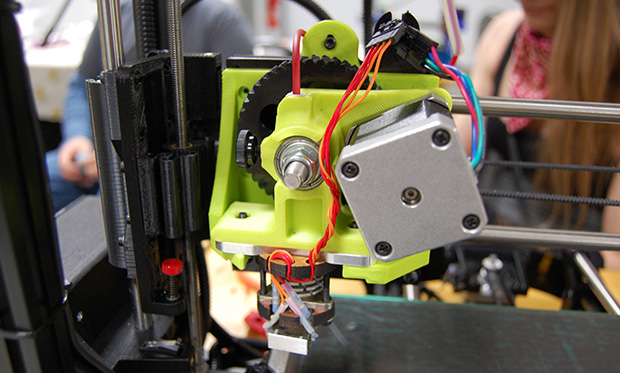
Our normal tool head uses a Greg’s Wade’s extruder, which we found did not work reliably enough with TPE to our satisfaction. The gist of how our extruder for flexible filaments works, is that it greatly reduces the number of places where the filament can catch on something and bind up. You can see the details of the extruder’s construction here: http://ohai-kit.alephobjects.com/project/flexystruder_assembly/
Note, the main bits were adding a PTFE tube running through the extruder block, and removing the idler. A thumbscrew was added to put pressure on the tube and is used to tension the filament.
Ah! I can definitely see the advantages. I’ve been mainly making drive belts with the TPE and these are easy things to extrude. Thank you for that link!
I’ve half an idea on scaling up a laser scanner just using a curved mirror, or at least a lens. Man-carrying turntables have been shown here before. And it doesn’t need to be motor driven, as long as it’s got sensors that know how far it’s been turned. Either from something like painting on Gray code, or even taping a Wiimote to the turntable and doing the maths. Then you could drive it by hand at any speed.
Just popped into mind, do they make adhesive tape with Gray code printed on it? I could think of all sorts of uses for that.
My thoughts on making it scale up, is more camera modules can be added (the basic design uses two), and camera modules with an extended viewing angle can be used. I’m not entirely sure I get what you’re going for with the mirror, but I am quite excited to see what people come up with in terms of modifying the scanner and making their own versions.
Webcam, lasers and turntable? You mean like this?- https://www.kickstarter.com/projects/568411200/rubicon-3d-scanner
Check the updates for the final design. They should be shipping first production run of 600 units by mi to en of April 2014. Yes, I’m a proud supporter of this Kickstart project.
Sort of, but with a little more to it. For one, the device is enclosed so that it is not at the mercy of the lighting conditions of the room that you use it in. The enclosure allows for it to be calibrated in the factory.
The other cool bit, is because it is enclosed, we can use a handy trick to divine more of the object’s topology beyond what you can normally do with an unenclosed laser line scanner. Have a look through my development thread to see examples of what I mean: http://forum.lulzbot.com/viewtopic.php?f=41&t=589