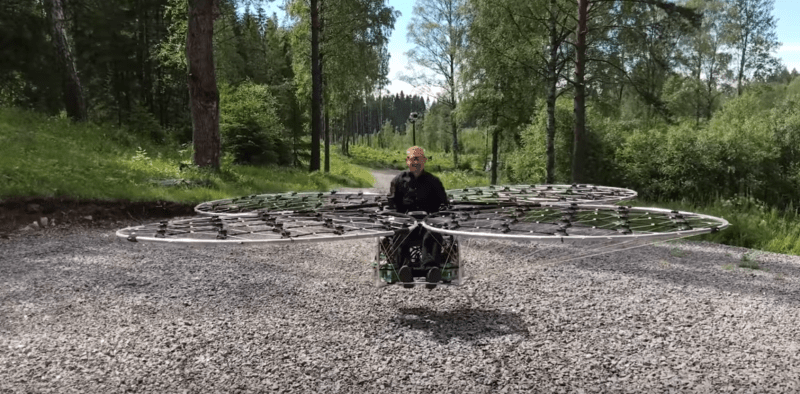
You can’t keep a good hacker down. [Amazingdiyprojects] wants to build a reliable manned multirotor, and by golly, he’s doing it. After a crash of his petrol powered design, [Amazingdiyprojects] went back to the drawing board. The new version is called chAIR, and is electric-powered.
The flying machine is lifted by 76 Multistar Elite quadcopter motors. Control is passed through 5 KK 2.1 quadcopter controllers. The KK board is a very simple controller, and we’re a bit surprised [Amazingdiyprojects] didn’t go with a newer setup. Batteries are 80x Multistar 4S 5.2Ah packs, stored below the seat. If these names sound familiar, it’s because just about every electrical part was purchased from Hobby King – an online hobby retailer.
The machine has an all up weight of 162 kg. A bit more than a single person can carry, but chAIR breaks down for easy transport.
We’re blown away by all the little details on chAIR – including the new control system. The left stick controls throttle, while right appears to control aileron/elevator and twist for the rudder control. Somewhat different from the collective/cycle controls found on conventional helicopters!
Even the battery connectors needed custom work. How do you connect 20 batteries at once? [AmazingDiyProjects] mounted XT60 connectors in a metal ring. The ring is compressed with a central screw. A quick spin with a battery-powered drill allows this new aviator to connect all his batteries at once. Is this the future of aviation, or is this guy just a bit crazy? Tell us in the comments!














Very cool. I’m not sure of the aerodynamics but I guess it’s staying in ground effect? At around 22:00 it kicks up higher but only momentarily.
Ground effect is the lift provided by an increased pressure between a wing and a stationary object. The wing(s) in this design is each propeller blade and the increase in pressure due to the ground would be very low given the pressure increase of the wing being spread out over such a large volume of air.
So unless I’ve completely misunderstood the ground effect it shouldn’t help.
The props are relatively tightly packed together so I think it might act similarly to a single big prop and be subject to ground effect. IIRC common wisdom is that ground effect is noticeable up to an altitude of about half the wing span.
Also IIRC [amazingdiyprojects] himself mentions in one of the videos that he’s staying in the ground effect for a large part of his flights so far.
The underside of a conventional wing at low-subsonic speeds pushes air forward and down. When the wing is close to the ground the air can’t be pushed down, so it increases the effective angle of attack. It also lowers losses from vortex formation because vortex formation is curtailed, so the induced drag is lower. These combine to form a notable increase in the L/D ratio. If the wing gets close enough one gets a foil bearing (itself a really interesting development.)
In this aircraft I’d say it has characteristics of ground effect – the air is prevented from being pushed down, and there is a limit to the formation of a vortex due to leakage around the perimeter. For certain as it gets farther from the ground the power requirements will go up.
>chAIR breaks down for easy transport.
Not as light, but self-assembling:
https://en.wikipedia.org/wiki/Goodyear_Inflatoplane
Seems like you could of filled them with helium, at least to neutral buoyancy.
Or deadly hydrogen!
Hydrogen is not deadly :-) You can even breath it, if you have sufficient oxygen in it.. But of course their is a difficulty: You do not want more than 4%vol to avoid an explosion risk and you need much more partial pressure of O2 to survive. Which requires increased absolute pressure, like in deeper diving: https://en.wikipedia.org/wiki/Hydrox_(breathing_gas).
Could HAVE filled them
Coulda filled ’em!
B^)
Man, I would be terrified to stay between hundreds of blades spinning at thousands of RPMs at my chest level!
weird, i actually got a lot more comfortable with the idea once i realized it was many-many small blades instead of 4 big blades. it could be worse, i mean :)
It looks safer and more practical than the 2-blade that was shaped like a motorcycle flier that someone made earlier. That said, nearly all Gen 1 flying contraptions are borderline deathtraps.
At least they aren’t at waste hight.
waist^^^
> Batteries are 80x Multistar 4S 5.2Ah packs, stored below the seat.
“Monsieur is kamikaze? Sitting on a bucket of badly balanced lithium batteries?” © ru-radio-electr community. Though original phrase was about electric bicycle.
76x Multistar Elite 5010 274Kv
80 x 5.2Ah x 14.8v = 6100 Watt/Hour
76x Multistar Elite 5010 274Kv (650 watt/hour MAX draw)
thats only 6 kilowatt/hour worth of battery/fuel, assuming those motors are averaging at least 300 watt/hour in a ground effect hover (probably more), yielding 22.8 Kw/Hr. Less than 10 minutes in hover. Realistically, he’s probably drawing 500 W/Hr per motor yielding closer to 6-7 minutes in a ground effect hover.
Not even taking into account of the power loss in the speed controllers, much less the motors…
It would make more sense to build a lightweight fixed wing than it would to build a multirotor. The power source just isn’t there yet for this. On top of that, the batteries he chose will loose capacity quickly, maybe 50-100 good cycles.
Cheers on a interesting concept though
“The power source just isn’t there yet for this”
– yes there is and there was …. 100 years ago… an internal combustion engine!
“– yes there is and there was …. 100 years ago… an internal combustion engine!”
So.. why not one internal combustion engine, driving many small rotors. Best of both worlds perhaps. Well at least you end up with lots of small flesh wounds, rather than suffering from terminal strawberry jam disease when one of the large props decides to let go.
What do you want to express with you quirky unit “W/hr”? A battery has “Wh”s (Watt*Hour, power* time) and a motor uses W (just power) or Wh if it runs for a defined time.
???? 76 whirling blades on a death machine… ????
Gives new meaning to “Electric chAIR”
THIS! To heck with all the spinning blades at chest level, I don’t care. I don’t have all that many years left anyway, might as well go out having fun. :D
Yeah! Damn the torpedoes, full steam ahead!
Been cool if it had been steam powered.
STEAM?
B^)
*reports comment*
:P
Going out in style with a 21-squirt salute.
You could probably save weight by using a generator of the needed wattage instead of the batteries. Now, about FAA regulations, pilot license etc…
Just about legal for ultralight class = no license, etc
The engineer in me is thinking that if the seat was mounted below the blades in the manner of a helicopter, he could walk more easily to the chair and have better stability with the center of gravity below the thrust.
Then he could mount batteries close to each motor, reducing long and thick power cables from the battery pack to the motors. Then also, if one battery catches fire it doesn’t affect other batteries, and he could lose a motor or two and still be able to fly.
Then add (yes, I’m aware of weight considerations) light, thin, and springy legs that hinge down below the seat to cushion the landing and provide a minor cushion in the event of catastrophic failure.
Also, titanium spars might be lighter for the same mechanical strength. More expensive, but maybe he could get a sponsor from an aerospace company or something.
Very cool project. What will we see in 20 years or so?
> and have better stability with the center of gravity below the thrust.
The engineer in you might want to take some physics classes…
Care to elaborate? (Just curious)
> The engineer in you might want to take some physics classes…
The part of you that isn’t a dick might want to explain why rather than just being a cocky know it all.
OP. Start by looking up the pendulum fallacy.
He seems to be thinking in a pendulum effect, where the load being carried (“Center of gravity”) is below the blades (The thrust).
That way the thing doesn’t behave like an unstable inverted pendulum.
yet again having all things central, load and thrust, would give more maneuverability without going into dangerous swinging/oscillation when exiting side turning rolls (Usual source in my experience) and pitch rolls (Going forwards or backwards). Too low a carry-load may impede on how hard one can maneuver their pitch rolls and their sidewards rolls before they buffer out under the downward pendulum.
He needs a positive feedback controller with blade pitch to control the oscillations – they would need to be controlled many times a seconds to avoid the roller coaster effect. Nothing an arduino and maybe PWM couldn’t accomplish, but I’m betting the pitch couldn’t be controlled fast enough with a speed controller.
The point is that the whole setup is unstable regardless of where you place the props, because as the whole thing tilts so do the props. A helicopter doesn’t actually “hang” down from the rotor like a pendulum – there’s no centering.
It’s better to keep the moment of inertia low, because that makes control loop tuning easier.
Those physics classes would presumably teach that the system as a whole wouldn’t be a pendulum. Because it isn’t.
Same thing with a rocket. Intuition says that placing the rocket above the main load should make for a more balanced system – but it is as stable as the same system with the rocket placed below the load.
See: https://en.wikipedia.org/wiki/Pendulum_rocket_fallacy
How many companies would be willing to sponsor such a dangerous monstrosity?
Red Bull would, if it were human-powered.
https://www.youtube.com/watch?v=syJq10EQkog
:D
Exactly as planned, mwahahahaha!
The engineer in me confirms what others have said about the center of gravity vs. stability comment.
But yes, it would be easier to access and you could place the electronics right together with each motor and that’s what someone else did about a year ago, and if you watch this [amazingdiyprojects]’ video on youtube it’ll probably show that other guy in the suggestions. Both have advantages.
But I think I prefer the “Kitty Hawk Flyer”-type frame, have you seen the Kitty Hawk Flyer videos? Yet another design where there are protective grids over the props and you can step on them and the props are fewer and everything is waterproof, only it may all be photoshopped and not exist but the idea is nice if you can build it light enough.
I’m pretty sure he was flying on his own property and under the 83 foot limit the US Supreme Court defined as “non-absolute” so the FAA has no reason to get involved during the development/invention phase. Plus the thing like darn light, one might even say Ultra Light?
I doubt the FAA could or would get involved, Axel lives in Sweden…
If it never leaves ground effect, no license needed.
If I may borrow a quote from an earlier thread.
I’m left thinking there was a Venus Fly(ing) Trap joke left somewhere.
RW says:
July 29, 2016 at 11:32 am
I particularly like the way it’s designed so that should he climb to a decent height, dive, and panic full power zoom, that the cross spars will fold in the middle and the props chop him to pieces to spare him the agony of waiting to die from hitting the ground.
First thing that come to me when I saw the photo was, how would it fold up if he were Wiley Coyote?
Sounds like a swarm of angry bees, but it is cool.
I would be absolutely terrified if I heard that sound and didn’t know what it was.
Kinda scary how those lines could snap, and fold on itself with him inside.
Sometimes when I read these posts, I feel as if I’m living in the time right after the Wright brothers flew. I bet there was a lot of talk about those “confounded flying machines” that make so much noise and are so dangerous with those blades whirring around. It’s almost as if to say if God had wanted to man to fly, he would have given him wings. In all honestly, inventing and inventions is a huge investment in time and yes, it’s a huge risk, but we live in a society that rests squarely on the shoulders of risk takers and inventors – both who have died due to time and died due to a mishap during the inventing process. If you’re always complacent about current technology and want to live a life of absolute safety, then the trade-off is an overwhelming and earth-shattering stop to innovation and technological developments. That’s not the world in which I wish to live. Kudos to this guy! I never thought I’d live long enough to see stuff like this happen and it’s frickin’ awesome!
People should do something safer…like invent the wheel. ;-)
This is awesome, seems to have a Lotta redundancy.
I want one ????
So, what do we call it? A septahexacopter?
Whirlygig? :)
1. The protective box in which the seat is placed should be extended up to also encompass the space in which pilot’s upper body resides.
2. Every flying craft with a chair (as well as pilot’s spine) needs a landing gear with some elasticity when making contact with the ground. If weight is a problem, at least strap a pressurized inner pneumatic tube of a large wheel under the bottom, to act like a boat fender.
3. Wear full motorcyclist helmet with a vizier when flying. It also reduces noise impact on ears and may save your life someday.
4. Think about how to bail out in a hurry if needed, Right now it seems like it would hurt a lot.
As helpful as it might be to have a high-ranking official on your side, this flying machine only holds one person — it couldn’t take off with the pilot and a vizier.
Lol, this is what I meant, but my spellchecker thought it not a proper word.
I looked up, the term I wanted there is: “face shield”.
“visor” is the word you seek :)
Excellent points – I think the movie shows he’s enough judgement to dispense with the risks if he see’s fit, but 4 points well worth thinking about carefully.
Should paint it green and name it Lucky. (Four leaves.)
Still amazes me, this guy does.
at the moment:
–I can pushbike on that thick grass faster than he can move,
–Attempting to go higher seems to become uncontrollable, spring like motion.. Like the cheap play-around quad I have.
–Assuming it can go higher, loads of practice is needed to get it stable, especially if it behaves like my quad.. but larger.
I have much faith this guy will succeed in more than just his current goals.
Another two words for future ideas: Pod Racer
He’ll race you across a pond. Or Lava.
Not sure I would want to be in a vehicle that takeoff depends on if I have had that extra doughnut for breakfast
awesome ..i like it …i wanna to build one …
Cringe, cringe, and cringe.
Flying-wires are a tried and true construct in aviation, and if properly terminated have a long safe life with easy reliable inspection. That said, we can’t see enough of the specifics to know if it’s been done right. I’m concerned that:
– It appears that opposing diagonal “rotor-discs” have the load from their flying-wires cross-connect by cable or rod under the greater chair frame, only they appear to be exposed to the ground at the corners of this assembly. They need to be protected from accumulated abrasion and impact damage. They need to be protected against impact damage/failure upon a hard landing. Or as noted above, this could become an instant Venus Fly Trap.
– I don’t see a redundant secondary safety wire securing the flying-wire termination bundles to the chair/assembly. Even a loop through all four bundle ends would provide some containment for time to get set down or contain/minimize a Venus Fly Trap. But they may be there, just not visible due to video resolution.
– The rotar-disc hoops appear to have a simple hole drilled through them for that end of the flying-wire. In places it appears to be a bolt through the hoop. We can’t see if there’s internal support. In places a bolt is largely vertical and in others horizontal, but doesn’t appear to be inline with the wire load. How that load is connected to the hoop is very important to prevent fatigue failure of the hoop metal, and could be subject to hole elongation under vibration. It needs to be appropriately robust and inspectable.
– Between the flying-wires and the motor-mounting grid, there appears to be an awful lot of holes in that hoop.
Why do I get the feeling the components are not going to be inspected for fatigue cracks using non-destructive inspection fluids. If I was getting in that (and I wouldn’t in its current form – not even for a run up), I’d want to know the condition of those hoops.
– I too would like to see him in a real aviation grade helmet.
– Four vertical poles up from the corners of that seat/assembly may provide some protection from the rotor-discs closing upon him a la Venus Fly Trap type failure. Perhaps a hoop connecting the top of those poles; if such could be placed such that it wouldn’t contact blades upon a fold-up, that would be a bonus.
– In addition, he needs something to protect his body from rotor blade shards should a branch fall out of a tree and into the blades. Oddly enough, depending on the material of the blades and possible velocities, some form of body armour may be the lightest option (and NOT like when I was a kid and we put on all the football and hockey equipment we could scrounge before going down in the ravine with our air rifles to play ‘war’).
*bump*
I’m afraid that a branch or one single acorn and he’s a goner.
Thanks for analyzing the video, you have more patience and better vision than me. :)
I had to. Couldn’t help myself.
Back in the day, I used to say that pay me $100 and I’d do a circuit in any ultralight, in perfect weather, in the still before sunset, just for the bragging rights. Given the way some of them were built, that was pretty bold. Others were quite reliable.
I wouldn’t sit in this one and spit it up.
I’m certainly older, perhaps wiser, or perhaps just scared, but I’m going with smarter due to experience.
There are very few that would sit in this one.
I wouldn’t want to be within hearing range to be honest!
I totally agree. I co-own an old ultralight and I have already had a few incidents with that device; I once lost part of the undercarriage during takeoff so that I had to land again lacking one wheel; a friend lost part of the engine in mid-flight and had to do a security landing on a field nearby, but that was completely easy-peasy as the craft is a well thought of (albeit not-so-well executed) design that just flies in a predictable manner. I also flew a few of the pioneering ultralights and those were a totally different thing, just out there to kill the pilot at the next opportunity. Or, as one of my flight instructors warned me: ” In those days, people thought they could re-invent aerodynamics”.
Methinks this is just the same stuff. We have been building aircraft for decades and learnt a few harsh lessons but every now and then someone prefers to risk his life ‘thinking out of the box’.
If I remember correctly, many years ago there was a big fad to build gyrocopters. Of course the biggest problem with them is they have a steep rate of decent on landing to keep the rotor at speed, so a miscalculation can put you in the dirt. I believe it was just after the James Bond gyrocopter scenes. A lot of People had mishaps with them.
I’ll defend him – not to argue with your points, but they all are aimed in the same direction – a ‘venus flytrap’ failure could have unpleasant consequences – he did stay limited to a limited distance above ground, even at the top of his ‘zoomies’ :-) Yeah, you go +20 feet in the air and your risk profile goes exponential, I’ll give you that, along with assuming such a prototype will be prone to stress failure – but that doesn’t make it not worth doing :-)
At 0:58 in Part 17, we see that the flying wire bundle end loads are transferred to flat stock that crosses under the seat/assembly. Still feels this needs something to protect it from the ground/gravel, other than the bolt head at each corner… At least the bend in the flat stock can be inspected.
Starting at 1:43 in Part 17, we see the hoop hole is stretched.
Really? That’s synthetic rope, not aviation cable? Yellow rope in Part 18.
Can’t tell in parts 19 & 20. In 20, possibly thinner and not yellow, colour of aviation cable?
Much envy here.
He’s doing so much right (look at the videos on how he got to where he is), and the flights in videos Part 24 and Part 25 aren’t the fastest I’ve seen but are superior in stability to anything I’ve seen yet (better than companies with huge budgets) – and with a human payload. Forget the improvements in design, it’s a shame to see unnecessary risks from the things missed. From his hovering vertical surges, I’d say he’s got the power for the tiny increase in weight for a redundant anchoring cable and a little more for stand-off and shock-absorbing legs/feet.
I hope he gets funds for doing a version II. And survives to be able to do it.
His video Part 24 shows him going from flat ground onto uneven ground, and around back to the road, very stable. NOT like a helicopter perched on top of it’s inverted bowl in ground effect. Impressive flight. Same for video Part 25.
He’s referring to “Kevlar wires” in the comments of video Part 19, which is materially (no pun) very different from hardware store rope. I’d still go for aviation cable. I’ve been out of the loop for years, but I don’t know of any flying-wire application using Kevlar.
You’ve been out of the loop for years, while [Amazingdiyprojects] is in four of them!
I wonder what “Kevlar wires” is. Some brands of fishing line is basically that. The expensive deep-sea leaders are surprisingly strong stuff.
http://www.cablemonkey.co.uk/137259-thickbox_default/pre-terminated-fibre-cable.jpg
I find it strange that so many are quick to point out this or that and be very critical of this build when there is little to no evidence that those who are so critical have not attempted such a build. One comment made the observations that most all historical attempts at building new or improved machines have had many failures that have ended up with injury or death, but if you don’t have failures one never learns nor tries something different.
One thing I do see in this build is that there was a lot of thought, trial and error and a bunch of trust in his desire to live another day, month or decades to improve on his design and make potentially commercially viable. These things are all part of prototyping and perfecting designs and implementation of them. So for me any negative or childlike comments should not be left. That being said informative, educational and positive feedback will get this project to a safer and quality product in the future.
None of us have all the answers, all the knowledge or experience in every realm of design and construction so lets help those who push the boundaries of what we know to where the boundaries are expanded to where we dream. One day at a time and positive, educational and thoughtful comments make us all better contributors to humanity.
I admire the hell out of the build and the man behind it – it’s certainly nothing but a one man prototype, and others have pointed out significant risks and failure modes, however the video indicates we’re dealing with a sensible individual with a decently developed sense of risk assessment :-)
That said, I give him +5 insightful for looking at the whole issue as a scaling problem – he just made my Quamera project on hackaday.io start lusting after a drone body, I’m embarrassed I never considered it before directly. Dumb me,smart him – spent a long time learning about dronecode and the other opensource stuff whilst thinking about scaling. So I will now gleefully copy Axel’s insight.
That said, as a machine vision guy, I have one concern/idea for improvement – the pilots eye video was obviously taken with a rolling shutter camera and equally and less pleasantly as obviously, it’s clear that the rotors in a single quadrant are not moving at the same speed. Yes, I realize the myriad of good reasons why, however I also realize that as the error increases, the attempt to scale existing quadcopter drone software will suffer. I’m thinking if you make each quadrant smart, and feed it info from a machine vision system, it can lean to maintain optimal rotor speed synchronization. Since I’m going for a much smaller platform, I’m thinking I got the budget to add a few more c|gpus and cabling……… I think I can make a machine learn to match rotor speed during a training cycle………..
+1 for global shutter suggestion.
I finally understand why so many videos look so weird!
This sounds a little like “My tool is a hammer, lets and task be a nail” or something. As useful as machine vision can be, the brushless motors are driven with power pulses, which are proportional to speed. So if you want to synchronize the props – which is probably a good idea – you can just take one phase signal of each motor to a suitable master controller.
BADASS!!!!
I Would Jump in this thing in a Heartbeat. Based on Nothing More than the Fact that the Guy Put Himself in it First.
What is the risk of Death or Injury Compared to a Life Un-Lived?!?
NO BALLS, NO GLORY.
Are There Better Ways to Do This. Undoubtedly. And I’m Sure This MAN Will Develop Them.
Da Vinci in a Flak Vest and Aviators Helmet? Pshaw!!
At the very least have a leather jacket and helmet on.
Yes the blades are small, but Murphy/Finagle/A disinterested universe will see to it that a small piece goes directly into your eye or someplace distracting…during a landing approach and whatever else can go wrong.
So yeah…you could put your eye out, kid.
Otherwise I dig it!
:)
He needs two extra things:
1.. hearing protector
2 . leather pants.
The leather pants are for if one of the batteries catches fire and the time it’ll take to get away.
also, leather is the classical aviator outfit anyway and as Michael Thompson says leather also protects against flying parts
.
Leather also does not melt, so it can also protect against HOT flying parts (if a battery catches fire too violently). Blacksmiths and welders use it for a reason. So it is very good advice to use it. Of course Kevlar or Nomex are also possible, but probably more expensive.