Last year we saw what may be the coolest application of a Kinect ever. It was called Kintinuous, and it’s back again, this time as Kintinuous 2.0, with new and improved features.
When we first learned of Kintinuous, we were blown away. The ability for a computer with a Kinect to map large-scale areas has applications as diverse as Google Street View, creating custom Counter-Strike maps, to archeological excavations. There was one problem with the Kintinuous 1.0, though: scanning a loop would create a disjointed map, where the beginning and end of a loop would be in a different place.
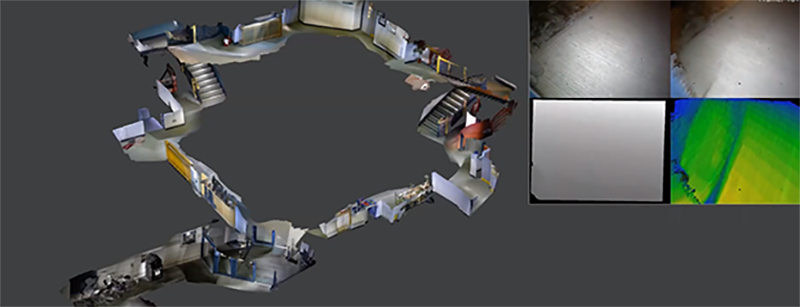
In the video for Kintinuous 2.0, you can see a huge scan over 300 meters in length with two loops automatically stitched back into a continuous scan. An amazing feat, especially considering the computer is processing seven million vertices in just a few seconds.
Unfortunately, it doesn’t look like there will be an official distribution of Kintinuous 2.0 anytime soon. The paper for this Kintinuous is still under review, and there are ‘issues’ surrounding the software that don’t allow an answer to the if and when question of release. Once the paper is out, though, anyone is free to reimplement it, and we’ll gladly leave that as an open challenge to our readers.
[youtube=http://www.youtube.com/watch?v=D3yYjaLmiqU&w=580]














I can imagine something like this would be useful for crime scene investigators.
Also cavers. Being able to map out complete cave systems would give them a very good indication of the size & layout of the caverns & tunnels.
Cave diving as well. Accurately mapping a flooded or submerged cave isn’t all that different from dry cave mapping. The water just adds a level of complexity and danger. I wonder if a Kinect could be stripped down to work on an ROV, or just mounted in a Plexiglas dome and spun like a marine radar set.
Or to prepare for the crime. ;-)
Well the idea is simple, the implementation is what is amazing. I like that they take time to capture the intersection where the loops close a little better, and it would be fun to see how it handles false intersections.
Somewhat related, the following doesn’t generate a 3D map but it also addresses the issue of disjoint maps.
http://www.youtube.com/watch?v=-0XSUi69Yvs
More information can be found at:
http://wiki.qut.edu.au/display/cyphy/RatSLAM
This looks pretty but slam loop closure has been around for a long time. You will probably find thousands of papers on it, and a few probably even used the kinect.
Yeah, but you can’t scan anything with just a paper, or even thousands of them. Implementation is cool.
Imagine this with a UAV, and GPS/ altitude sensor.
You’d have those floating orb scanners from Prometheus.
I was just about t say that. I would so make that if I had a blueprint of some sort to boost me in that direction.
Would help building VR worlds, definitely.
Also handy for archeologists I imagine.
Don’t forget to show a little love for science once in a while.
Yeah, ages ago I saw a documentary where some guys 3D scanned an Egytian tomb with about a hundred thousand dollars of lasers and spinny doohickies. Now, it produced more detailed models, but being able to get even a tenth of the detail with a thousandth of the cost, *much* less weight, and entirely commercially-available, non-specialized hardware is just mind boggling.
I watched this in total awe, muttering “…my god…” to myself. I can see countless applications for this.
One step closer to a Pipboy or other map-recording PDAs
This tech would be great for engineering site visits. It wouldn’t replace surveys, but typically we go out and take photos on site before we start our work or to check as-builts. It would be sweet if we could chuck this on a quad-copter and let it fly around and map the area.
like this? http://www.youtube.com/watch?v=IMSozUpFFkU
Jus put it on bingbus and we got street view 2.0