The art of hacking requires you to straddle many different types of engineering. In this case, it looks like [Dan] could use a little bit of brain-storming on how to get this doubly-failed project back on track. Do go easy on him as he wasn’t the one that submitted the write-up for this week’s Fail.
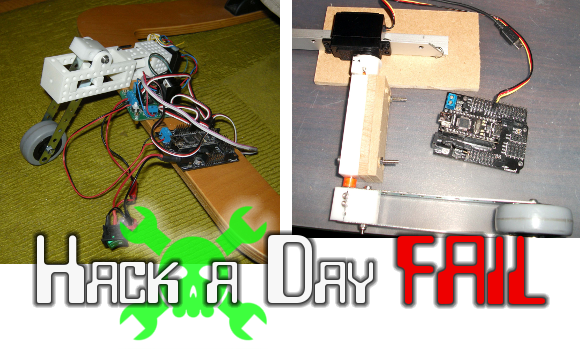
He set out to build an automatic baby rocker which he refers to as a baby bouncer. The idea is simple, but execution becomes a bit more difficult to manage. His first attempt is shown on the right. It’s a fairly powerful servo motor, connected to a rocker arm that terminates in a wheel. He used Delrin machined by hand (well, you know what we mean) to fabricate the connecting parts. There’s plenty of torque as this had no problem shearing off the set screw. But the mechanical advantage just isn’t there.
The second iteration is on the left. You can see he got as far as installing it on the rocker, but it’s basically a no-go. The white frame was designed in OpenSCAD and printed by Shapeways. It transitions to a stepper motor with a threaded rod to transfer force to the wheeled-arm. Check out the video below to see how too much resistance causes the mechanism to slip.
There are two things that we think need to be added to this design: mechanical advantage, and jamming relief. Please contribute your constructive comments on how this rocker can be brought up to snuff. This might be a great time to break out your diagram creation skills.
[Thanks Matt]
 Fail of the Week is a Hackaday column which runs every Wednesday. Help keep the fun rolling by writing about your past failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.
Fail of the Week is a Hackaday column which runs every Wednesday. Help keep the fun rolling by writing about your past failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.














Inverted pendulum and resonance. :D
He lost a lot of the torque from the stepper when he disassembled it to peek at the insides – this causes the stepper to lose a lot of it’s magnetism.
When you disassemble a stepper motor you create a paperweight. I’ve heard that a reassembled stepper motor is about 10% of its former self. So yes, a lot of torque flew the coup.
This is VERY interesting !
I had no idea that was the case, but now I’ve googled it and you’re totally right.
I haven’t done any proper testing of before and after, but now that you mention it I remember that I kept wondering why the heck a stepper comparable in size to a Nema17 produces so little torque whereas the Nema ones can drive 3D printers and other stuff…
WOW, that’s probably the most useful comment I received, thanks a ton !
Dan
I would have thought of a continuous motor and a cam before a servo. Like in the top of an engine, only instead of valves, you’re lifting and setting down the bouncer.
Or use a string and anchor to pull on the top instead of lifting the bottom. Should reduce the load.
(those bouncers are great sanity savers for parents)
I am with the same thinking. Don’t even need a servo. Just a motor spinning a wheel at the desired speed. The wheel spins a camshaft that spans the width of the rocker providing the up down motion.
Wow… what a lovely way to be featured on Hack a Day ! :)
Anyhow, worry you not (is that even proper English ?) version 2 for my 2nd baby is in the making, and using an electric car window motor, which believe me, has more than enough torque !
Now the problem is, how to stop the eldest baby who’s now 2 years old, from sticking his fingers in the device or pulling it apart within 2 minutes !? :)
Good job HaD, now I’ll finally have the necessary pressure to finish V.2 !
I can’t wait to see all the (mostly) constructive suggestions…
Dan
As far as keeping it out of other-baby’s reach, a bowden cable with enclosure would be a nice way of doing things.
” my 2nd baby is in the making”
My brain read that part out-of-context….
Have fun!!
A beef enough linear actuator (Solenoid), actuating at the right time, should do the trick.
“Fail of the Week: Automatic Baby Rocker”
So many better “fails” were in my imagination then in the actual article.
I was hoping to see some epic baby crashes, with infants being flung into the wall like a NASCAR wreck! *giggles*
Yeah, I was hoping for “Automatic Baby Rocker become Automatic Baby Launcher”
Soooo sorry for disappointing… ! :)
I’d go for a rack and pinion set up to reclaim that mechanical advantage, moving that arm so far away from the servo that first time creates too much torsional shear and you lose a lot of toque. Changing to rack and pinion set up gives you more torque and the translational motion, instead of the torsional, keeps things as close to the prime mover as possible (maximizing leverage). Then I would just go for an H-bridge/motor controller to vary the speed and direction to a comfortable level; you don’t really need a servo if you can get a decent dc motor
My grandfather built such a machine 50 years ago with a car windshield wiper motor (I guess no interval mode at that time).
It worked, technically.
Family story is, however, that my mother/uncle/aunt didn’t like it. Maybe it was too regular?
I don’t believe Karl and pcf11 for one second.
I was surprised also, but there seems to be some truth into it:
http://www.cnczone.com/forums/stepper_motors_drives/129500-opened_stepper_loss_magnetism_pressure.html
Believe it. I bent the shaft on a couple of stepping motors so I opened them up to look, just for giggles. On reassembly, the detent feeling was no longer there and the armature could just spin around (they were NEMA-17 200-step motors, those don’t ever just spin). They would step but had almost no torque. So weird to have something stop working without even a wisp of smoke :)
This is the most interesting bit about this fail. Good to know, since I eventually take everything apart — will have to avoid taking apart perfectly good stepper motors.
Who’da thunkit
Agreed. Totally surprised me. I had taken one partially apart. It was an usual configuration, where in the mounting plate was on the ‘bottom’ of the motor, rather than the side that the shaft exits. I was wondering If I could swap the plates. I go the ends off and realized they would only go on one way. Luckily, pulling the rotor out seemed difficult as it didn’t just slip out of the main case, so I just reassembled it. no apparent loss of stepping feel, but I have yet to power it up and run it. likely ok since I did not decouple the rotor and magnets?.
Hacked automatic baby rocker? What could possibly go wrong?
hm, i think a wheel and piston, like a steam engine in reverse, powered by a constant speed motor on the wheel side, and rack and pinion on the cradle side would be pretty easy to throw together, with plenty of tq. pretty much all of the finger eating parts can be flat and on the same plane, so its easy to shield. wheel and piston provide the velocity differences you want in a rocking cycle.
re wheel and piston – sounds more like a baby launcher ;-) *kidding folks*
Read it as: Automatic Baby Rocket – sounded a bit more action packed! ;)
want.
I see there’s a lot of demand here for some baby launching action… maybe we are onto some new product idea !:)
You vicious HackADay bunch !!! :)))
Well… it will keep [Dan child 2] from touching more than once…
I did this once…
I used a DC motor coupled to a small axle that was cross-drilled (basically a mini-winch). That was mounted beneath a bouncy seat, and I ran a line from the bouncy seat to the cross-drilled hole. Nominally the line had a small amount of tension so either way the motor started turning would pull the seat down. The motor was sent a randomized sinusoidal torque command. That caused the seat to bounce, but not in a regular way.
The motor was kept small on purpose and there were multiple levels of safeguards. Still not comfortable putting a baby in it.
I think a regular rocking pattern is what the baby would prefer, since that’s how you rock them in your arms. Your idea of a line is good, nothing to catch anyone’s tiny fingers in, just a line coming through a small hole into the sealed motor box. Which you could mount to the frame of the rocker. A line is also a good deliberate point of failure, if stuff goes wrong it just snaps and goes limp.
Of course, you buy electric baby rockers in shops now. They’re usually battery operated, perhaps in case you forget to switch them off? Or maybe parents don’t like putting their kids in chairs that are wired to the mains. Especially in the USA.
My thought is to keep all of the power within a very small area around a geared motor. Think of an egg shaped or ovular disk of wood, mounted slightly off center of the motor shaft. With the right shape you’d have a sin(ish) wave movement of the disk edge pressing upward against the edge or a piece extending from the bouncer. Close it all up in a toaster-like shell so that just a small portion is out making contact for safety.
Mayhaps this won’t work with your bouncer shape though.
Good luck! Commendable project.
The commercial baby rockers use a rather small motor, roughly the size and power of an electric screwdriver, a spring loaded linkage, and resonance. I think I’d use a relatively large solenoid or car door lock actuator and some switches (hall effect/prox maybe?). Same idea as pumping your legs on a swing, fire the prime mover for a short period of time and add just enough energy to get it moving up to and maintain movement.
I’ve seen the commercial baby rockers and I clicked on this article thinking, “God, I’m gonna see some poor little baby flying across a room.” Fortunately, at least for the baby, I was wrong. Unfortunately for me, I was mislead.
hard to tell in the photos, but is this sort of like a rocking chair, that you want to rock back and forth? It looks like the wood frame is curved under the seat, and you are attempting to repeatedly lift one side.
If my assumption is correct, perhaps it would be easier to motivate the rocker from the center of mass, rather than trying to “lift up the wheel barrow.” A seasaw paddle under the seat coupled to the frame by motor or solenoid might be easier. especially since you can use the mass of said baby to return. The initial rock would be the hardest effort, and from then on, you need only add a little force to the motion each time to maintain it.
How does this guy have time to be a professional engineer, father, and tinkerer?!? Do they have 36 hour days in London or something?
Can’t wait for my son to grow up a little so that he can help me with the tinkering… for now he’s mostly disassembling things ! :)
hehe I could FILL hack-a-day with fails! Every kid knows — to keep a rocker, or anything resonant, going, you don’t need much force, just a nudge the right place in the cycle. Even just a slight weight shift will do. So mount your de-torqued stepper underneath and give it a weight it can move from side to side and a way to detect the motion of the rocker.
I would think a wiper motor would work. Preferably quiet. I first thought of a servo motor, but those are way too loud. Attached to that is a springy type arm pushing against the ground. It might take a boost to get it started, but the springiness in the arm should help with the resonance.
That title with the skull and cross-bones logo had a kind of macabre implication.
So, I know this is less cool and less fun, but I was wondering about getting and automatic baby rocker/swing (wait… Hear me out) because I can get one for about $25 on Craigslist. But then, is want to use the raspberry pi to control the setting is on based on how loud the baby cries. Like the Snoo, but for less that $1000. Just another idea. I hope you get this working!