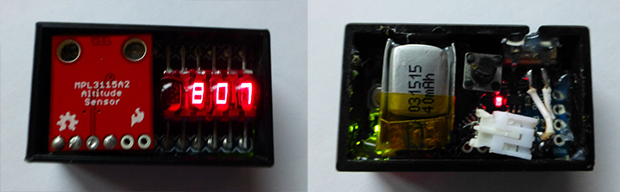
While traditionally a project geared more toward the model rocket crowd, a lot of people are flying quadcopters these days, and knowing the altitude your RC aircraft reached is a nice thing to know. [Will] came up with a very nice, very small, and very lightweight altimeter that’s perfect for strapping to microquads, their bigger brothers, and of course model rockets. As a nice bonus, it also looks really cool with an exceedingly retro HP bubble display.
The components used in this tiny altimeter include a MEMS altitude and pressure sensor, HP bubble display featuring four seven-segment LEDs, an Arduino Pro Mini, and a tiny 40 mAh LiPo capable of powering the whole contraption for hours.
In the video below, [Will] shows off the functions of his altimeter, sending it aloft on a quadcopter to about 100 ft. There are settings for displaying the minimum, maximum, and delta altitudes, all accessed with a single button.
While it’s not the most feature packed altimeter out there, it’s still much better than commercial offerings available for the model rocket crowd.














I may have missed something here (possibly as I haven’t done anything with RC planes myself). This is an altimeter designed to be mounted on an RC plane and fly around… where you can’t see the display. I get why logging the highest altitude would be useful for a model (or non-model) rocket, but I’m not seeing the use case for planes.
Other than my lack of understanding, it’s a really nice piece of kit :)
I think for an RC plane, a good hack will be to have the display at ground and the altimeter on board, with a wireless serial protocol transmiting the altitude in real time.
For an RC plane I’d see this being useful for FPV. You can fairly easily mount this in view of the camera. No need for protocols or whatnot.
Nice idea, like a heads up display but you don’t have to deal with video overlay.
It’s basically a simple flight data recorder of sorts. Stores high and low altitude stats during a flight so you can go read them when you collect the aircraft again. Probably could expand this with a few I2C devices like a large EEPROM and a bunch of other MEMs sensors for measuring other flight metrics.
Hmm, I didn’t see any voltage regulation in there (unless I missed a bit). Do these kinds of sensors perform well over variations in supply voltage?
You missed a bit, there is a voltage regulator on the arduino.
“While it’s not the most feature packed altimeter out there, it’s still much better than commercial offerings available for the model rocket crowd.”
Bull Crap. There are lots of very nice altimeters for model rockets including ones that will set of charges for parachutes.
There is a subgroup of RC glider pilots that fly hand launched gliders. Altitude information is important to these pilots to know how high they are launching. I like the red display on this project, really easy to read. If you want a logging altimeter, check out http://openaltimeter.org/
“it’s still much better than commercial offerings available for the model rocket crowd.”
I’d have to strongly disagree. The Raven altimeter is a highly sophisticated altimeter using both accelerometer and barometer readings to determine altitude, as well as being able to control multiple events at specific times and altitudes.
http://www.featherweightaltimeters.com/The_Raven.php
That being said, it is a very impressive project for a more DIY approach.
I fly an experimental full size float plane. The “tiny altimeter” described above in this 2014 article could serve an important safety role for amphib pilots. Each year there are accidents caused by the pilot forgetting to retract the wheels for a water landing. The result is an upset where the plane flips on its back the moment it touches the water and many times a fatality due to drowning. Conversely, amphib pilots also forget to put the wheels down for a runway landing and while this type of accident is not fatal it severely damages the floats. These accidents happen when a cockpit distraction allows the pilot to to forget using a checklist .Amphi pilots are taught to use a checklist to avoid this situation and we usually check the gear position at three different altitudes. The first altitude is 1200′ AGL (landing zone flyover altitude),
1,000″ AGL (pattern altitude on downwind across from the planned landing point) and 500′ on the final approach.
The device as described above would very useful if it could advise the pilot with a momentary light/alarm signal as the aircraft
descends through these altitudes to remind the pilot to “Check the GEAR” at each of these three altitudes.
I would like to discuss this idea with the inventor of the “Tiny Altimeter” and see if it could be adapted for this use.
Can you advise me if this possible.
The bubble display has been discontinued, what substitutes are available?