 [Patrick] has spent a lot of time around ground and aerial based autonomous robots, and over the last few years, he’s noticed a particular need for teams in robotics competitions to break through the ‘sensory bottleneck’ and get good data of the surrounding environment for navigational algorithms. The most well-funded teams in autonomous robotics competitions use LIDARs to scan the environment, but these are astonishingly expensive. With that, [Patrick] set out to create a cheaper solution.
[Patrick] has spent a lot of time around ground and aerial based autonomous robots, and over the last few years, he’s noticed a particular need for teams in robotics competitions to break through the ‘sensory bottleneck’ and get good data of the surrounding environment for navigational algorithms. The most well-funded teams in autonomous robotics competitions use LIDARs to scan the environment, but these are astonishingly expensive. With that, [Patrick] set out to create a cheaper solution.
Early this year, [Patrick] learned of an extremely cheap LIDAR sensor. Now [Patrick] is building a robotics distance measurement unit based on this sensor.
Early experiments with mechanically scanned LIDAR sensors centered around the XV-11 LIDAR, the distance sensor found in the Neato Robotics robot vacuum cleaner. [Patrick] became convinced a mechanically scanned LIDAR was the way forward when it came to distance measurement of autonomous robots. Now he’s making his own with an astonishingly inexpensive LIDAR sensor.
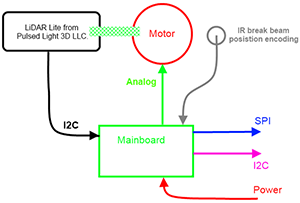
The basic idea of [Patrick]’s project is to take the PulsedLight LIDAR-Lite module, add a motor and processing board, and sell a complete unit that will output 360° of distance data to a robot’s main control system. The entire system should cost under $150 when finished; a boon to any students, teams, or hobbyists building an autonomous vehicle.
[Patrick]’s system is based on the PulsedLight LIDAR – a device that’s not shipping yet – but the team behind the LIDAR-Lite says they should have everything ready by the end of the month, all the better, because between these two devices, there’s a lot of cool stuff to be done in the area of autonomous robots.














Well – until that PulsedLight system is shipping, a low-cost LIDAR sensor (beyond a few options) is almost ubobtanium right now.
I have noticed something, though – and I am currently playing with one right now:
I’ve noticed on Ebay that old SICK LMS-2xx series units are showing up – most of the time in the $200.00 to $400.00 USD range. I recently purchased and received an LMS-291 for $200.00; savvy bidders might be able to get one slightly cheaper.
Be warned, though – so far, my adventures with the unit have been anything but straightforward. First I had to build my own cables – further complicated by the fact that one of the many sets of documentation out there for these units has an error in the pinout. Even after correcting that issue, though – and verifying that my serial port is set properly (9600, 8N1, no flow control) – and is outputing data properly (tested via a loopback, and via an oscilloscope) – I am still unable to connect with the sensor.
The sensor is supposed to dump a bit of data via the serial port upon successful boot-up. My LMS does pass its self-tests, and shows a green LED (according to the docs, this means a successful boot).
I’m in contact with a SICK representative – he is claiming that the sensor might be stuck in a programmed 500kbps (RS-422) mode; I am trying to get clarification on this, because the documentation seems to suggest a power-cycle resets the default to RS-232 9600 bps mode. When I look at the output on the scope (an old Tek 2213B analog scope) from the LMS sensor on boot, the data (if any – hard to see with this old scope) just blasts by, and doesn’t seem to have much, if any, voltage differential.
I am not sure what is going on, but I hope to get this sensor working. They aren’t small units by any means, but if for some reason they are appearing at lower costs on the second-hand market, and they are in working condition – it might mean a new source for LIDAR for hobbyists.
Seeed Studio is selling something similar for $400. http://www.seeedstudio.com/depot/RPLIDAR-360-degree-Laser-Scanner-Development-Kit-p-1823.html
Anyone tried it yet?
I’ve I have tested the Unit Seeed is selling. It works, but default program only runs on windows. I wrote a quick and dirty radar-like display using pylab. You can see some silhouettes of me sitting at my computer here: https://plus.google.com/u/0/communities/101981201962256466651/s/lidar.
The new Kinect is basically a short range LIDAR imager. It would be interesting to see how it could be hacked…
The problem with kinect is the power consumption. It freaking needs 12v. I shudder to think how much power it needs.
It eats up 150w
12 watts
It’s more than 12w
According this this: http://www.joystiq.com/2010/11/04/kinect-teardown-two-cameras-four-microphones-12-watts-of-powe/
Andres is correct in saying 12W.
Not sure about the new Kinect, but the classic Kinect can be hacked to run on 5V from two USB 2.0 ports.
http://www.eevblog.com/forum/reviews/kinect-teardown/
Someone should measure the actual power use of the new Kinect. The classic has a 12W PSU as well, but actual power usage is more like 4W.
Could someone explain how the LIDAR-Lite is a LIDAR sensor? It’s an infared LED, not a laser. Of course it’s cheaper than a LIDAR system- there’s no laser!
Last time I checked, LiDAR stood for “LIght Detection And Ranging”. What part of that phrase requires, or even implies, the use of a LASER?
Specifically, it’s an IR ToF (Time of Flight) distance sensor. I’ll leave it to an economist to explain why it’s cheaper ;)
This sounds like a good idea on the surface, but I’m not sure the technology is a good match.
The LIDAR-Lite site says they avoid needing to do precise edge detection by taking correlations over a 0.05 s sampling time. How do you reconcile that with a mirror spinning at whatever you hope you 360 degree acquisition rate will be? I’m also confused why he’s hoping to get a sample rate of 100 Hz, when the LIDAR-Lite people’s 0.05 s number suggests to me no faster than 20 Hz (unless they’re using a sliding window, I suppose).
Or buy a new Neato XV-12 for $209 (on sale online now) and get the nice laser distance sensor along with batteries, a charging station, motors and encoders.
Or, if you are cheap, partly broken XV-11 and newer models are frequently under $100 on ebay and the Laser Distance Sensors have worked on all the ones that I have bought. And then you can sell or use the other parts too.
about the Neato-cheap-lidar, what about the MTBF of the motor? and what about the quality of the sleep ring ? do you think it is a toy-sensor that will be out of work in a short time, or do you think it could be really used in a really life home made robot project ?
also, what about the Asus Xtion instead of the Kinetics ?
Too bad it’s just shipping to the US, otherwise I would’ve most certainly bought one.
Doesn’t Kickstarter require a prototype? They seem to have really low requirements for “prototypes”.
He has a piece of wood, spinning a motor with a standard photo interruptor. Something you can build in < 2 days of work with old parts floating around.
He does not have the sensor, he does not have any custom electronics/software for this.
He is not even using the Motor he wants to use in the final unit (he is using a model aircraft BLDC with a motor driver in the Video but talks about Motor+Bearings+Belt = 4$) and I guess he also does not have tested the slip ring and how everythings works once put together.
Seems dodgy to me (as he put it on Kickstarter waaaaay too early in the development process).