For all the Roombas in the world, you have to wonder why robotic lawn mowers aren’t more common. Sure, you can go out and buy one, but mowing the typical suburban yard is a piece of cake for a robot; there aren’t stairs, there are relatively few obstacles, and a boundary wire system is much simpler than simply bouncing into things like an iRobot.
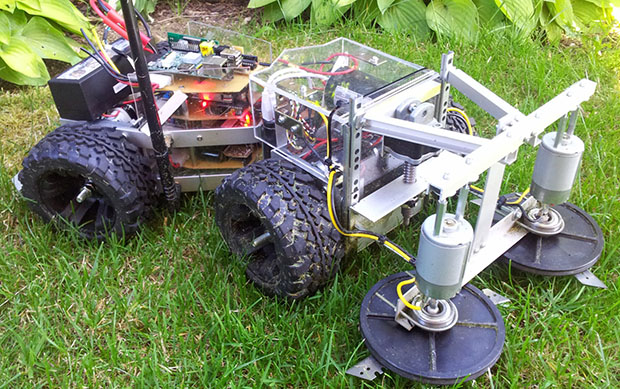
[Schuhumi]’s autoCut is the only household robot to make the semifinalists in The Hackaday Prize. Underneath, this bot is electric, has fully automatic operation, and even has a motor to change the height of the blades. The blades are actually designed more like a stringless weedwacker; the blades pivot back when they encounter a hard obstacle, although this safety cage is a really good idea
Instead of doing the random ‘bump and turn’ algorithm found in a roomba, there’s a lot of thought put into navigation with this bot. [schuhumi] is using ultrasonic navigation that triangulates the position of the bot in a yard. That’s a great idea; there’s no need to waste time or power rolling over what the bot has already cut.
You can check out [schuhumi]’s overview video and a demo below.
 The project featured in this post is a quarterfinalist in The Hackaday Prize.
The project featured in this post is a quarterfinalist in The Hackaday Prize.














Very nice. Now does anybody know of a wildlife-safe robotic lawn mower design? I have accidentally run over a rabbit nest with a small mower in a suburban backyard (that might be undetectable since they are below ground level with grass on top). And I almost ran over a fawn once or twice while brush hogging (when they are really small they freeze rather than try to run).
I don’t think anything will ever be “Wildlife-Safe” especially if it is automated. The best you can hope for is probably going to be to minimize the chances you will run over something cute by adding tons of sensors.
Make the robot the size of a cigarette packet. It’s got WEEKS to finish the job, making it big enough to finish in an hour is totally unnecessary.
best idea I have is throwing a few ultrasonic emitters on one and scare them away before the bot gets there. not a 100% effective but it would help.
Grass is usually cool to the touch, even on hot summer days. A bolometer might work for mammals and birds. For children you’d need a proximity sensor and a way to quickly stop the blades.
I know we can’t assume animals will be intelligent enough to know what this thing is, but almost every animal I’v ever encountered seemed to be capable of determining that the scary thing with lights and ominous whirring motor noises should be avoided. Looking at it from a purely Darwinian view point, if the animal doesn’t have the instinct to flee from something it doesn’t recognize, it probably wouldn’t have survived long enough to encounter this grass murdering machine. I have a soft spot for little furry things, but lets be honest, if its foolish enough to stand in front of the spinning blades of grassy death, it probably wasn’t long for this world in the first place.
Maybe manufacturers could license this for mowers..
Sawstop.com
https://www.youtube.com/watch?v=eiYoBbEZwlk
Is that not trilateration?
Triangulation is measuring angles. E.g. for finding out how far away a ship is when you’re stood on a beach. You literally use a triangle.
I thought about doing this with just two base stations a known distance apart (at X=0) and some other method of cheap comms on top (IR, nrf24l01). All you need to know is the ping time between the stations and the ping time to your vehicle. Then the maths to get X and Y of the vehicle is really simple.
I never thought about trying to encode the data with ultrasound though. I wonder how it will hold up to interference.
P.s. This thing looks like it was made to chop off pets/childrens/your legs.
I think they are using multilateration.
I agree those blades look like they could chop off someones legs.
> I never thought about trying to encode the data with ultrasound though. I wonder how it will hold up to interference.
It works very well indeed: http://hackaday.io/project/1797/log/9774-ultrasonic-data-transmission-proof-of-concept
Meantime I improved this so that distances can be measured. Will upload the video about it very soon
> All you need to know is the ping time between the stations and the ping time to your vehicle. Then the maths to get X and Y of the vehicle is really simple.
And this is exactly what I’m gonna do. I use sound though because it’s rather slow, so distances can be measured easily
> This thing looks like it was made to chop off pets/childrens/your legs.
I have a hood made out of acrylic glass, but it’s not mounted in the video. And just recently the new hood laser cut from aluminium arrived: http://hackaday.io/project/1797/log/9959-laser-cut-aluminium-parts-arrived
Thanks for the reply! That all makes sense. But if something happened to start spewing out ultrasound (a drone files over with a distance sensor pointing down), would the mower still be able to calculate where it is?
P.s. I’ve had somewhere between 2-3m accuracy out of an adafruit ‘ultimate GPS module’ – It has the option of getting updates at 10hz too.
You’re right, another 40Khz source could interfere with the positioning system. At least checksums and checking if results are sane can prevent misleading navigation.
Luckily so far I didn’t have this problem at all. Nothing (cars etc) caused problems. On the other hand I live in a small village where bats might be the major cause for ultrasonic noise :-P.
But I discovered that the ultrasonic sensors/transmitters have not a very big opening angle. Since the sounds must travel in a planar shape manner, id’t be probably a good idea to trim the transmitters in a way that the sound gets emmited just horizontal and the receivers pick up sound comming in horizontal with higher gain. That way hitting the receivers vertically from obove shouldn’d cause too much interference.
I’d guess that maybe another bot in a neighbouring yard would interfere.
Neat project and it seems to be working too! It looks like it would benefit from an auto-height adjustment on the cutting heads though. When the wheels drop into holes and such the blades seem to cut right down to the dirt.
Thanks, this has been in my mind since the robot got electric height adjustment. But I haven’t come up with a great idea to measure the height between the hood and the actual ground yet…
try something like a springloaded caster wheel out in front of the cutters with a slide pot
This touches a special place in my heart because I too am working on Wi-Fi enambled GPS guided lawn bot. Love some of the design but the turn radius seems a bit on the wide side to me. Course I guess I really can’t talk much since I’m still working on the base platform/chassis for my first lawnbot :P
Figure I’m ~$430 into it and have ~80% of the parts just need to figure out the whole “how everything goes together” part lol
The thing I really love about working on a lawn bot is you can really push yourself and not feel terrible about the budget because the price for the off the shelf lawnbots are freaking insane. Plus it is really easy to out feature them.
If I ever manage to finish it I’ll have to write up an Instructable or something :P
The turn radius is not as good as on designes where the mowing platters are between the wheels. On the other hand it has wider mowing width and can reach nooks properly, and usually the area to mow is bigger so it’s not too much of a problem.
Have you any numbers on how accurate your GPS is? It is the exact reason why I’m doing this whole ultrasonic thing…
While I understand using what you have, perhaps a better (less stable) option would be dual driven front wheels and a freeewheeling caster or two in the rear? I deal with small turn radius forklifts and ride on mowers all the time with that setup.
Fair point one of the things that has bothered me about the design I’ve settled on is that the mower heads are going to be between the wheels so I’ve had to accept It just won’t be able to get into super tight spots and it will always leave an edge around fences :/
I really haven’t used GPS before but according to the data sheet it is accurate to within 2.5-3meters which is admittedly a lot of leeway but as long as there isn’t a ton of drift (again never really dealt with GPS) It shouldn’t in theory be a huge problem. Since I’m not looking for it to accurately pinpoint my location on a map just give a reliable and consistent readout for what will amount to a virtual fence. Supplemented with some additional sensor inputs, rangefinders etc to deal with life’s little surprises. Might also try to do a little machine vision to make sure it voids the street, course there is always the tried and true method of actual electronic fence. Pretty much I’m using the mower as an excuse to go buck wild with any and everything I have wanted to do but never had a decent robotics platform to do it with.
– Awesome project, and thanks for the ultrasonics info! If it is of any interest, I did look into using GPS for a mower also with a set of NS-Raw gps modules and RTKLib processing using one of the pair as a base station, but couldn’t get readings reliable/stable enough to control mower pathing (even with the 20″ mower deck on my unit). Maybe with some really good antennas, or if you don’t have tree coverage you could pull it off, but I didn’t have much luck anyway with my ‘budget’ setup. I have a good number of weatherproof ultrasonic rangefinders around that I had been thinking of hacking up to pursue this exact idea with, since GPS seemed like a no-go, but time has prevented that effort so far,so it is awesome to see proof of the concept here and know that it works! Thanks for all of the writeups!
Look out, cats!
What an awesome little project.
Thank you very much Brian for this great article! Was quite surprised when I did my casual HaD check :D
BTW: Here’s an update demoing distance measurement between master and node via ultrasonic sound for the positioning system: http://hackaday.io/project/1797/log/10029
Blade guard with casters to control hight or make it larger and weaponize it, looks like it would be effective against a zergling swarm. Good Job!
it needs a kit of parts so you can buy all the parts to get it all going ,as this is a market waiting to fly big time as gardeners are all peed off with lawn mowing ,its so time consuming nowadays
Kids Will love it.
kekekekekekekekekekeke!!!! Also it looks more like a prototype robotic labotimizer. All that is missing are the zombies
I haven’t looked at your build log, but could you put small wireless broadcasters on posts that mark the corners of your yard and use them to triangulate the mower’s position? It could eliminate the GPS accuracy problem because you’re not using GPS.
Just a thought.
Thats exactly what I’m going to do witht the ultrasonic navigation. Didn’t even try GPS since accurate positioning would require high end differential GPS.
Read the blades pivot out of the way when they hit something. I can guarantee if you hit something right those blades are coming off and you will find them while walking barefoot through the yard.
Well, I actually hit a lot of things (wood, stone, flowerpot etc) and had no problems at all. I don’t use crap cheap hardware store blades, but these: http://shop.janser.com/product_info.php/info/p262038500_Long-H-D-Blades-100-pcs-GREEN-BOX.html
Once due to dumbness I had the two platters running against each other with distance <0… There where sparks and everything, but appart from slight damage of the tips nothing happened.
Hey awesome project, looking at doing something similar my self, have you looked at http://www.ardumower.de/index.php/en/ that is my starting point I think :)