Just a few years ago, palm sized radio controlled toys were nothing more than a dream. Today, you can find them at every mall, toy store, and hobby shop. [Alvaro] couldn’t resist the tiny Estes Proto X quadcopter. While he enjoyed flying the Proto X, he found that the tiny controller left quite a bit to be desired. Not a problem for [Alvaro], as he embarked on a project to reverse engineer the little quad.
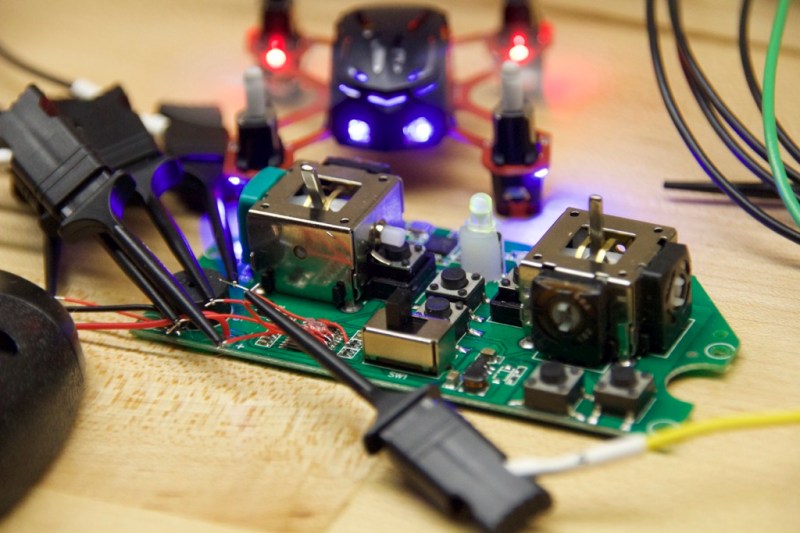
Inside the quadcopter and its lilliputian radio, [Alvaro] found a STM8 based processor and an Amiccom A7105 2.4G FSK/GFSK Transceiver radio. The A7105 is well documented, with datasheets easily obtained on the internet. The interface between the processor and the radio chip was the perfect place to start a reverse engineering effort.
With the help of his Saleae logic analyzer, [Alvaro] was able to capture SPI data from both the quadcopter and the transmitter as the two negotiated a connection. The resulting hex files weren’t very useful, so [Alvaro] wrote a couple of Python scripts to decode the data. By operating each control during his captures, [Alvaro] was able to reverse engineer the Proto X’s control protocol. He tested this by removing the microcontroller from the remote control unit and wiring the A7105 to a STM32F4 dev board. Connecting the STM32 to his computer via USB, [Alvaro] was able to command the quad to take off. It wasn’t a very graceful flight, but it did prove that his grafted control system worked. With basic controls covered, [Alvaro] knocked up a quick user interface on his computer. He’s now able to fly the quadcopter around using keyboard and mouse. Not only did this prove the control system worked, it also showed how hard it is to fly a real aircraft (even a tiny model) with FPS controls.
The Estes Proto X is actually manufactured by Hubsan, a China based manufacturer best known for the x4 series of mini quadcopters. Since the Proto X and the x4 share the same communication protocol, [Alvaro’s] work can be applied to both. With fully computer controlled quads available for under $30 USD, we’re only a few cameras (and a heck of a lot of coding) away from cooperative drone swarms akin to those found in the University of Pennsylvania GRASP Lab.














Pretty neat sniffing. This might come in handy one day to have documented. Good work!
offtpic:
I like it when tinkers go the extra route and just start their camera and plainly show what they were doing to get to that point. No shyness, no insecurity. Just turn on the cam and talk to your listeners. I like this style in the present community.
You may want to have a look at DeviationTX project: http://www.deviationtx.com/
This projects is an open source firmware for Walkera radios, allowing user to unlock a few functionnalities, and make their radio compatible with other protocols (including some of the protocols used by those tiny quads)
On this very topic too, Bradwii is another awesome and incredible project, taht ports the well-jnown Multiwii flight controller software to palm-sized quads like this one.
http://www.rcgroups.com/forums/showthread.php?t=1922403
Pretty sure the hubsan x4 protocol was reverse engineered in 2012!
But the cool thing is the absolutely tiny hubsan q4 is compatible! I’d love to get FPV on something as tiny as the q4!
Well, here you go then…. http://www.rcgroups.com/forums/showthread.php?t=2226779
:)
Nice practice and description, but this protocol’s been cracked for a while, See here; http://www.rcgroups.com/forums/showthread.php?t=2165676
Reminds me when I hacked the Walkera W100s wifi cam+control, did a half backed Android app, before someone else made a commercial version for it and I lost interest, flying it with the RF transmitter is way better than with wifi.
This is much more interesting for the idea of having a computer or something else control the quad.
Because the protocol is the same you have always been able to use the x4’s much bigger better controller with the proto x, (it even has functions to do auto flips and rolls), so if you dont like the tiny controller there are much easier (better?) options.
It is also the same as the TRAXXAS & many others.
Now if I only had the time to make the board control some bigger stuff……
Thank you for perhaps the most level headed thing I have read today. Now we know all pros and cons of the form. I mostly use http://goo.gl/6T9yZy to edit my PDFs. I think it also allows you to to create fillable pdfs and esign them.
Thanks I have read most of these my drone is a protoz drone but the best I take it for challenges