Lunar dune buggy rides, piloting the most powerful machine made by humankind, stuck thrusters, landing, eating, sleeping, and working on the moon. It does not get any more exciting than the Apollo program! I was recently given the opportunity to sit in on the MIT course, Engineering Apollo: the Moon Project as a Complex System where I met David Scott who landed on the moon as commander of Apollo 15. I not only sat in on a long Q and A session I also was able to spend time with David after class. It is not every day you that you meet someone who has landed on the moon, below are my notes from this experience.




Background
David Scott flew on Gemini 8 with Neil Armstrong during the stuck thruster incident. He was the command module pilot in Apollo 9 which was a test flight of the complete Apollo spacecraft system. He landed on the moon as commander of Apollo 15, which was the first mission to carry the lunar rover.
Personality
David lives up to his legendary status as an Apollo astronaut while also being very approachable. His sense of humor had the class in an uproar on many occasions. The MIT students were asking very specific technical questions. David’s deep understanding of everything about the Apollo system was impressive, not a question couldn’t be answered in detail and with additional nuance that may not even be in the history books yet. I’m sure he would have drawn block diagrams and schematics if we had asked.
Gemini 8 and the stuck thruster
You’ve probably heard of the stuck thruster incident during Gemini 8. One of the maneuvering thrusters stuck-open, causing the spacecraft to rotate faster and faster and faster again. So fast that David and Neil Armstrong were starting to black out. They survived it by shutting down the one thruster system and using the reentry thrusters to stop the spin.
The mission had to be ended sooner than expected. Re-entry began over Africa which was not the original plan. During re-entry they passed over the Himalayas and soon thereafter landed the south China sea. David told us that the view of the Himalayas was absolutely amazing.
David and Neil were not totally confident that they had made it over ocean which necessary for a normal landing. Fortunately Neil was able to confirm this with his mirror looking out the window, seeing ocean through the window. Chutes opened and there was no need to eject over land!




Quality of Apollo simulations
David told us that the simulations were remarkably accurate. His recollection was the only difference between the simulation and being on the moon was the fact that you were on the moon. Quite an endorsement of the Apollo simulators.

David is a big fan of simulations. He told us that when traveling into space you want to simulate as much as possible while on the ground so that you get to know the systems and your fellow crew members. Apollo went so far as to simulate parts of the mission with the CM and LM inside of a huge vacuum chamber.
The simulators were hybrid digital and analog systems. David told us that the people running the simulations were trying to kill them by causing a large plurality of alarms, false alarms, systems failures, partial failures, and so on. It required an engineer’s mind to solve the puzzle presented by almost any alarm because alarms were not always what they seemed. Correctly solving this conundrum of machine feedback was a matter of life and death during a real mission.
David had kind words to say about the controversial LM flight trainer. This is a vehicle flown in earth’s atmosphere in order to train the astronauts; the same one that crashed and nearly killed Neil Armstrong. Without this the moon landing would have been much more dangerous.
Abort control on takeoff
There is an abort control on the left side of the left seat (pilot’s seat) of the command module. It’s a very interesting thing, if you are at the start of your flight rocketing up with the whole stack (F1 engines going) and you rotate it right then the entire stack is now under manual control where the pilot in the left seat is manually flying the entire rocket.
This feature was never used but it was tested in simulation many times. Apparently under manual control you had to keep a pair of crossed needles lined-up on one of the instruments on the front panel while riding the most powerful machine ever made by humankind. It sounds extremely challenging, right?
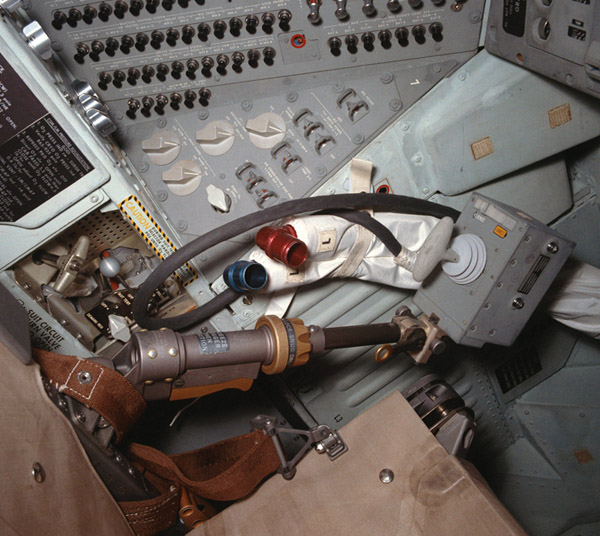
If you turned the abort handle left then the escape rocket at the top of the CM would fire, subjecting the crew to 14G’s. Nobody wanted to rotate it to the left because, as you can imagine, 14G would not feel too good and aside from personal comfort the crews were extremely motivated to make things work no matter what happened.
Even when Apollo 12 was hit by lightning, causing the electrical systems to go crazy as it was clawing its way up into the atmosphere, the abort control was not touched. They still went for it.
Apollo 15 landing
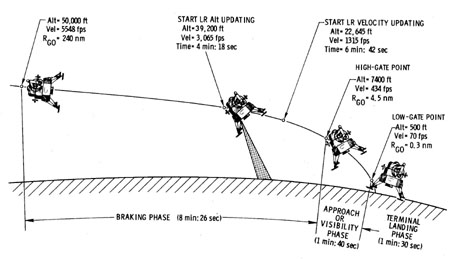
David and James Irwin landed between the two largest mountains on the moon at a steep descent angle so that they could safely ‘thread the needle’ between the two mountains. David admits flying the LM is a challenge, but even more so with the added weight of the J mission which includd the rover, tools, experiments. This weight penalty was further compounded by the steep descent angle caused by the mountainous approach.
Why manual control on final phase of descent
David talked about how the LM could land on the moon entirely by itself but the last portion of the landing was always taken over by manual control. This was not macho fighter pilots showing their bravado at the controls, instead it was a safety concern. There was not much time to react and trouble-shoot if an alarm light occurred on the final phase of descent. By contrast if a pilot were in control he would feel the spacecraft do something different if there was a problem and be able to naturally compensate. This is why the last phase of landing was achieved with manual control.
Don Eyles, who was key to architecting the LM’s software and specifically the landing programs, was sitting next to me in the audience and took this all very well. Later that evening I was able to chat with Don, he is also extremely interesting and a super-nice guy, he explained to me that the entire Apollo computer was made from NOR gates and showed me one of the logic cards.
Living on the moon
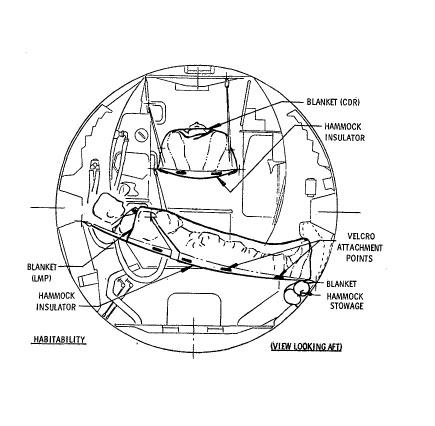
During Apollo 15 David and James had to live and work on the moon for 3 days which meant that they had to develop procedures to live, eat, and sleep on board the LM. Not a trivial task.
Sleeping in a space suit was not comfortable, resulting in little sleep. Space suits had to come off every evening. Taking off the suits and not getting lunar dust all over everything in the LM was tough, apparently this was done in a large bag of sorts to at least minimize it. Hammocks were setup in the LM and the guys slept in their underwear.
They researched circadian rhythm, which was not well known at the time. Moon time became Huston time for the purposes of maintaining their sleep-wake cycles.
When examining the space suits on board the LM, they found that the caked on moon dust was surprisingly abrasive. This raised concerns about the integrity of the suits’ air-tight fittings.
The lunar rover, dune buggy on the moon!
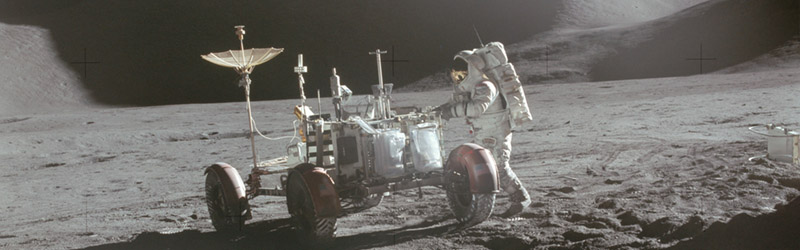
As if you had any doubts, but David confirms the lunar rover was really fun to drive. The vehicle had a wide wheel base, a low center of gravity, and each wheel had its own motor. But there was one occasion that caused a stir when the rover nearly slid down a mountain.

David and James noticed a green-colored boulder on the side of a fairly steep mountain so they cruised to it in the rover. In 1/6 gravity it wasn’t long before the rover started sliding sideways down the mountain! James had to catch it with his own two hands. Mission control did not have a live video feed during this time so the guys kept it on the DL.
This is the photo of the green rock with the rover in the background, one of its wheels up in the air and James is literally holding the vehicle up, keeping the rover from sliding further down the mountain.
Feather and hammer gravity demonstration
Which falls faster in a vacuum, a feather or a hammer? David wanted to test-out the feather and hammer drop right away because there was a risk that static electricity could cause the feather not to drop. For this reason he brought two feathers with him, one for the video recorded demo and the other to test it first. Fortunately the demo was a huge success. We’re greatly amused that David’s reaction to the successful experiment is “How ’bout that?”!
NASA Culture during Apollo
Being involved in startups I’ve always been curious as to what the cultures are like in other fast organizations. Apollo was fast, in about 7 years they went from Gemini missions to walking on the moon with an organization that included nearly 400,000 people (of course this is a high estimate, including the subcontractors and so-forth).
How did they do it? I asked David this question specifically.
The astronauts were closely involved in development. David was involved in the development of guidance and navigation. He also developed the layout for the panels on both the command module and the LM from a pilot’s perspective for ease of use.
For example the Friday Tindall meetings involved representatives from each major subsystems. The objective of the meeting was to solve problems and make decisions affecting all of the major systems. Engineers in attendance were empowered to make decisions for their respective teams and decisions were communicated the program via Tindall memos.
“Well, I just got back from MIT with my weekly quota of new ulcers, which I thought might interest you.” – Bill Tindall, June 13, 1966.
These memos were funny to read but also key in keeping everyone on the same page. Of course some decisions were overturned when more info was available the following week, but this was the synchronization pulse.
In summary, meetings were for making decisions and every engineer had a voice, listened to no matter what level.
David also pointed out that generally speaking, Apollo engineers were of the can-do variety. They may have never done the thing that was being asked of them but they were willing to give it a try, make mistakes, and learn from those mistakes.
Read the book and Prof. Mindell
Look, you may not ever be faced with the amazing opportunity to hang out with an astronaut who has been to the moon. But the astronauts from all of the various missions have been great at sharing their experiences.
Credit for this experience belongs to Prof. Mindell, who is the Frances and David Dibner Professor of History of Engineering and Manufacturing (STS) at MIT. Prof. Mindell created the course and wrote the book Digital Apollo. This book is a must-read for those interested in the nuts and bolts of the guidance, navigation, and many other technical details of the Apollo system.
Prof. Mindel also wrote two other books that might be of interest to the Hackaday community:
- War, Technology, and the Experience Aboard the USS Monitor,
- Between Human and Machine: Feedback, Control, and Computing before Cybernetics, I’ve recently completed reading this book, it is on the topic of the electro-mechanical computers used in WW2 for fire control, which has been a topic of interest recently on hackaday. This book is a must-read for those interested in the nuts, bolts, and historical background of WW2 technology.
Summary
We can learn a great deal from how the Apollo program accomplished its missions and should always take the opportunity to listen to those who worked on Apollo. If you’ve had the chance to meet someone having to do with the program please let us know about your experience in the comments below.
Author Bio
Gregory L. Charvat is a huge fan of manned space flight, is the author of Small and Short-Range Radar Systems, co-founder of Hyperfine Research Inc., Butterfly Network Inc. (both of which are 4catalyzer companies), visiting research scientist at Camera Culture Group Massachusetts Institute of Technology Media Lab, editor of the Gregory L. Charvat Series on Practical Approaches to Electrical Engineering, and guest commentator on CNN, CBS, Sky News, and others. He was a technical staff member at MIT Lincoln Laboratory where his work on through-wall radar won best paper at the 2010 MSS Tri-Services Radar Symposium and is an MIT Office of the Provost 2011 research highlight. He has taught short radar courses at MIT where his Build a Small Radar course was the top-ranked MIT professional education course in 2011 and has become widely adopted by other universities, laboratories, and private organizations. Starting at an Early Age, Greg developed numerous radar systems, rail SAR imaging sensors, phased array radar systems; holds several patents; and has developed many other sensors and radio and audio equipment. He has authored numerous publications and has received press for his work. Greg earned a Ph.D in electrical engineering in 2007, MSEE in 2003, and BSEE in 2002 from Michigan State University, and is a senior member of the IEEE where he served on the steering committee for the 2010, 2013, and 2016 IEEE International Symposium on Phased Array Systems and Technology and chaired the IEEE AP-S Boston Chapter from 2010-2011.














lol
lol what?
What a fantastic write-up!
Wow, I’d love to speak to someone who has walked on a moon set built in the middle of the desert to aid in the propaganda of the US space race against the Russians.
You should watch that documentary Room 237. One of the conspiracy theories is that Kubrick is confessing to faking apollo footage with his hidden narrative in The Shining. I don’t buy any of that, but it’s an entertaining argument.
Not as entertaining as Buzz Aldrin punching someone for accusing him repeatedly of being a liar. I think it’s rather sad that some people cannot accept that we are actually capable of such amazing things and apply that inspiration to their lives to see how far they can reach. I suppose it’s easier to be destructive than to be creative. :-/
It’s typically the people that cant chew gum and walk at the same time that deny the moon landings.
Especially considering how many times the stupid conspiracy theory has been disproved over the years. I can’t believe people still buy into that pathetic nonsense.
I applaud Buzz Aldrin for having the restraint to only hit him once. Police refused to press charges.
(People who believe the moon landigs were faked are idiots. Stupid idiots with an agenda, the worst kind of idiots)
The Russians would of been the first to cry foul had this all been staged. They were able to independently track the entire mission(s). Second, their intelligence agencies would of know of such shenanigans had they taken place, as they were busy collecting blueprints and other. Instead, there were among the first to congratulate the U.S. for their accomplishment.
Most people who claim this was a hoax do so because the team that went to the moon was way too “white male” for such a major accomplishment. Sets a bad precedent. Only a future multicultural endeavor with Jesse Jackson’s & Terry O’Neill’s blessing would be even worthy of such an accomplishment.
By the way, one reason I am an engineer is I had a high school electronics instructor that was part of the Apollo program. His jobs was data recording, he even brought to school a printout of the countdown schedule, with the tasks he preformed highlighted.
True if it was fake the Soviets would have been the first to make the claim as it would have been good propaganda to use against the US and capitalist ideology esp considering they were trying very hard to make a moon landing themselves but were having worse luck.
They actually had a lander crash and burn – Russia was also on their way to the moon!
The moon hoaxers make me sad – even highly educated people sometimes are landing deniers – though they are often immigrants to America.
I’ve had GREAT FUN learning about Apollo missions by researching the Hoaxers claims – its very obvious the hoaxers themselves almost never research their own rhetoric – as there is great answers to every one of their ‘arguments’.
The Room 237 movie is great fun, even if you have absolutely no doubt that there was a moon landing. Recommended for the quizzical and absurdists.
They also had many successful unmanned landers including two rovers and three sample return missions.
I strongly disagree with the butthurt implied white supremacist leaning in your post, but your teacher sounds awesome.
The reasons people deny the moon landing are multivariate. There are more countries than just USA – people around the world have come to expect empty rhetoric followed by untenable actions – the result of our neo-colonialism and neo-conservatism – AKA American Exceptionalism. To these people, many younger adults, the idea of a lying country like USA doing something so great is hard to fathom.
On the other hand, many people in USA (including other white supremacists such as yourself) have outsider views they seek to bolster by affirmation via unrelated outsider views. Hence the ultra-religious, hate addled, and other subcultures harboring a lot of landing deniers.
Also we are subjected to propaganda, no matter our country. Modern propaganda from many countries is likely to account for some amount of the moon-denying – possibly via PayPal donate and advertising ‘payment’ to individuals already taking part in hoax-promotion as cottage industry – which is yet another species of rampant moon denier, and promoter of all sorts of other disinfo and outright scams.
In short there are many complex and sometimes unfortunate reasons people deny the moon landing – but NONE, and I mean absolutely NO ONE claims that it is a race thing. You need to seriously reevaluate your logic, social, and scientific evaluation abilities. Holly Cr4p.
Why are you writing this? And why here?
It is a reply to Steven-X RE “Most people who claim this was a hoax do so because the team that went to the moon was way too “white male” for such a major accomplishment. Sets a bad precedent. Only a future multicultural endeavor with Jesse Jackson’s & Terry O’Neill’s blessing would be even worthy of such an accomplishment. “
*slow claps* Congratulations. I deal with “The Public” at my job, and that was the dumbest $h!7 I’ve heard all day. You have exceeded all expectations.
First of all, you must realize there was an element of sarcasm present. Otherwise, you also forgot “sexism” as well since I included the president of NOW.
I had no intent of “white supremacy”, especially since my two daughters are the same percentage white as our current president. I realize you are not sitting across a table from me, so there is no way of exchanging in a true dialog. You take an idea and run off in a tangent. Just remember how Benny Hill explains “assume”.
In addition, you must be immune to some of the crap going on in many of our college universities. Just look at “tweet-gate” going on with a certain Sociology professor (a “me too degree” if there ever was one). I personally am glad I went to school in the 80’s.
Really, this was more of a jab at Jackson shaking down the tech giants like Google because there are not enough women/minority employees. These companies want top talent, and I have no doubt if you have it you will exceed in the tech business, regardless of skin color. Heck, the line up to grant H1B visas to engineers from India.
By the way, Here is a quote from “Denying the Apollo Moon Landings: Conspiracy and Questioning in Modern American History” (Roger D. Launius, Smithsonian Institution):
Those polled were asked, ―Do you really, completely believe that the United States has actually landed men on the moon and returned them to earth again?‖ While numbers questioning the Moon landing in Detroit, Miami, and Akron averaged less than five percent, among African Americans in such places as Washington, D.C., a whopping 54 percent ―doubted the moon voyage had taken place.‖ That perhaps said more about the disconnectedness of minority communities from the Apollo effort and the nation‘s overarching racism than anything else…
I also ran into a guy who claimed to be a “Black Hebrew”. Now that was in interesting take on history. And yes, many of them deny the moon landing occurred…. though I also admit that is a minority opinion (pardon the pun).
Bottom line: I personally have no issues with anyone who has the same aspirations and interests as myself. It really is a content on one’s character verses anything else that matters.
https://www.youtube.com/watch?v=P6MOnehCOUw
“Wouldn’t it be great to make everyone think we’d landed on the moon? That’d show the Soviets.
What would it show them?
Well, they’d think we’d landed on the moon and they’d be all afraid. Do this right and the Cold War could be over by 1971.
Why don’t we just release the footage of the Mars landings?
No, no. It’s vitally important that we keep the successful mission to Mars a secret, but I’ve got a hunch that if we pretend to land on the moon, that will be in some way intimidating.
Will people believe us?
Oh, I’m sure they will. To the extent that we won’t even need to bother to pay much attention to detail, with regard to flags and shadows, and so on. You’re the top spy when it comes to misleading footage, what do you suggest?
Well, to start with, we’ll need to build a massive rocket.
Why? We’re not going.
Sorry, I thought that was the point. Have I got this wrong?
We’ll need a rocket because the first question people will ask when we show the footage will be, “How did you get there?” So we’ll have to be able to say, “We went in that massive rocket you saw.
Hmm. So, we’re not actually going to make any kind of saving in terms of the cost of a massive rocket?
No, but we will be making a saving on the cost of actually going to the moon.
True, and what costs are involved in actually going to the moon?
Well, the main one, to be honest, is the massive rocket.
Any others?
Well, other than that, it’s mainly catering.
So we’ll make a saving on that?
Well, no.
In fact, it’ll probably be more expensive to cater for an entire film crew for the duration of a shoot than it would be to feed three astronauts.
So, erm I’m just wondering, we have to build the massive rocket capable of going to the moon?
We will have to do that, yes.
So, I was just thinking, if we’ve built the moon rocket, might it not be cheaper to just pop to the moon and fake the footage there?
Fake the footage of the fake moon landing on the moon? What if people found out?
That’s a risk we’re just going to have to take.”
P.s. – Great Article!
Sleeping in a space suite sounds pretty luxurious to me…
Please call you Mummy. You got lost here…
At least we were consistent, it was a Space Suite like 4 times in the same paragraph :-P
Fixed.
Huston, we have a prblm. ;-)
“wait, I paid for a first class ticket. what do you mean there’s no moon service?!”
(sorry) ;)
Couldn’t be a suite. The LEM’s only had one room. The ISS and Mir, those are/were space suites.
NASA – “Never A Straight Answer”.. and no third party collaboration for scientific results… its all bullshit until someone else also verifies it.. after 40 years we all are still waiting… “walking on the moon?” I say.. PROVE IT.. (or rather, an independent should.. although probably hard to find a truly NASA independent government or scientist with the capabilities to so.. sigh…).. they are just now doing in depth studies on the Van Allen Belt.. the main barrier they have yet to cross and bring back living people – ask the Russians how many they lost trying to repeat NASA’s claim..
The Russians were entirely competent, capable and independent(being at cold war!) from the US government, they didn’t doubt that men had walked on the moon.
The Russians would have gotten there second if they either built a test stand for the N1 first stage so they could work out all the vibration issues in the plumbing or if they used Proton and LEO assembly of the moon mission.
It should be noted the Saturn V may have not have worked either if they didn’t build a test stand for it as in early tests the S-IC first stage and F-1 engine had vibration and pogo issues that likely would have destroyed the vehicle in flight.
It still had some pogo issues on it’s first few flights but not enough to destroy the vehicle.
The N-1 was tested, and failed more than once, on a test stand. Its problem was individually the Soviet rocket engines were too weak, so the needed to use many more of them, which increased the weight, which needed more engines and more fuel…
They were stuck in the bottom of the rocket equation. What they built which could get itself off the launchpad was far more complicated than a Saturn V. The more complex a system, the more likely it is to fail. Combined with iffy Soviet metallurgy it was exceedingly unlikely any N-1 would NOT have had an explosive failure.
Even the rocket family the USSR and Russia has launched so many of has had a rather high failure rate, fortunately without any human fatalities on launch – at least any that anyone else knows about. The USSR also has the only known actual emergency use of a launch escape system when the rocket blew up on the pad.
The USSR made the first Moon impact landing and the first soft landing and (IIRC) the first sample return, all by unmanned probes. The USSR sent the first two unmanned rovers to the Moon, Zond 1 and Zond 2. China recently sent the 3rd. USSR were still launching (and failing a bunch) with unmanned probes while Apollo missions were landing. On video of one, a Soviet Moon probe fail can be seen zipping along in the background as it whiffs past without hitting the Moon. Shortly after that fail the USSR gave up on sending anything to the Moon.
The Soviets may have continued their manned Moon landing program but the one man who was the driving force behind it died and the government quickly shut it all down. Had he lived longer, it’s likely he would have realized that a large number of small engines wasn’t ever going to be reliable and he’d have to design much larger, far more powerful ones. The Vostock and R7 series that have been used since 1957 are designs in the same vein as the N-1, and light up around 30 engines to launch.
More of those have been launched, and more have failed, than any other rocket design.
And today it is the Russians who have to only major payload launch capability left on Earth.. how many launches can NASA perform today.. maybe none? they have no launch capability anymore and rely totally on others.. hows that for a success story?
dont fall for the nonsense they faked it . repeatable scientific method proving its fakery http://www.aulis.com/stereoparallax.htm
The claims the author makes about parallax depends on three critical factors.
First, the lens must be distortionless – for a given camera and subject location, there will be slight distortion depending on whether the subject is straight ahead or on the edge of the frame.
Second, his 2km distance figure only applies with the 1.5m parallax spacing he used. If I take a pair of photos 10cm apart, parallax will vanish well before 2km. But if the images are separated by 15m, the detectable parallax depth should increase to ~20km.
Third, the motion must be retain the same distance from features. (left, right, up, and down are fine; forward and back will corrupt the parallax data.)
If you can find a parallel set of images that satisfy the above criteria (all of Apollo 15’s photos are online: http://www.hq.nasa.gov/office/pao/History/alsj/a15/), then you’ll have evidence.
You can see the landing sites and the buggy tracks on the moon from a modern high power and high resolution telescope. Oh and all the retroreflectors they placed, etc. Stuff that 6th grade science covers.
https://www.google.com/search?q=images+of+lunar+landing+site+and+buggy+tracks+from+a+telescope.&safe=off&es_sm=119&tbm=isch&tbo=u&source=univ&sa=X&ei=TfxQVdGMA4jHogS2kYGwBg&ved=0CB4QsAQ&biw=1191&bih=745
I know that as a nutter, this will do nothing for you.
ha- if you say so. it is amazing that even with the hubble telescope you cannot really see anything..just an arrow that someone says” there it is now shut up” I don’t see it,
and further, if the USa had gone to the moon, we would ahve gone back by now. and this article doesn’t convince me of anything..
guss grissom doubted we could go to the moon and he was finally silenced, wasn’t he.. ???
> guss grissom doubted we could go to the moon and he was finally silenced, wasn’t he.. ???
I really, really hate moderating these comments.
On one hand, I was worried someone would complain the header image for this post was of Jim Irwin, not Dave Scott. On the other hand, god damn.
+1 Is this really what the HaD readership is like? In some ways I’m not surprised, but I feel like I should be.
@TheRegnirps
I meet the readership. 99.9% of the time, they’re freaking awesome and do interesting things. I moderate the comments. They’re completely different demographics.
No, you can’t see that with a telescope, at least not from the earth. These images were taken from lunar orbit by modern probes.
And then photo-shopped to show you what they wanted you to think you saw… wake up people.. don’t be such ignorant manipulated tools…
And. What a bloody tool you are sir!
So in spite of all the evidence (rocks, reflectors, live video), you still believe our trips to the moon were faked? The Russians don’t, nor do the Chinese. Nor the Australians. Are they all in on this global conspiracy?
You realize that Apollo didn’t “hang out” in the Van Allen belts, right? They passed through them. It’s not the radiation that kills, its the integrated exposure – level times time. Go fast enough and you’ll make it.
And, exactly how long do you think it takes to cross through the belt while escaping gravitational pull.. a minute.. an hour? it is a serious enough problem that the electronics must be shielded with great effort, rad hardened, etc. to live through it..
The Australian magazine Nexus has an article in almost every issue on either 911 or the Moon landing being a hoax. Of course followed by an article claiming NASA reverse engineered the spacecraft from Roswell.
Obvious Troll is obvious.
Waste of effort. People who are not convinced by the evidence we already have are never going to change their minds.
Thank you Gregory for largely summarizing why my interest in our space program has been an interesting ride. It was an interesting to read your summary of the Gemini 8 incident, and of course the circumstances concerning Apollo 15. A note of trivia, all three of the Apollo 15 astronauts were Air Force officers.
And the LM was built right here on Long Island.
Ahhh… The moon denier lunatic crowd. Never a dull moment on the internet. Let me guess, you’re from the UK or some other country that never did anything in space and have a bad case of “little man syndrome” as a remarkable number of moon deniers are. How Sad.
I have no doubt we went to the moon in the 1960’s and 70’s. Could we do it today? Not in this generations culture of “risk analysis overkill”…
Actually surveys have shown that there a higher percentage of people in the US think that men have not walked on the moon.
I’m a British person who completely believes that NASA has sent men to the moon.
Incidentally the UK has done many things in space, although we have never launched a manned mission of our own.
A high percentage of americans don’t know how many states the united states has… and a very high percentage cant tell you the capitols.
Including one highly placed one with a comment about 57 of them, and more he hadn’t been to…
A high percentage of americans also can’t tell the difference between “capitol” and “capital”
Those that deny the Moon missions are the same that believe velcro is something aliens introduced in Earth.
One thing I always have wanted to ask : We have telescopes. Even a home made ( a good one ) should show the things that were left in the Moon. Hubble maybe ? That would silence most of the disbelieving crowd .
Just today i saw the episode of the big bang, where they shot lasers at reflectors on the moon.
Also there are pictures of the stuff on the moon, including the tracks.
And those reflectors had to be put there. Those who deny we got to the moom usually try to change topic when confronted with that. They are the same as a guy I once knew that wouldn´t agree there were dinosaurs. When asked what where those big bones found, he would say they were “something else”…
s/moom/Moon/
Many moon-landing deniers are in fact bound to be religious fundamentalists, yes.
They read the same specious pamphlets (now websites) as conspiracy theorists.
Sadly, it won’t. It all just becomes part of the greater conspiracy – while the only valid truth remains random screeds on the internet about shadows and flags and other impotent, feeble minded jackassery.
But, since you asked about seeing the landing sites, here is a link to images of the actual Apollo 11 site, taken by the Lunar Reconnaissance Orbiter Camera over the past few years: http://www.lroc.asu.edu/featured_sites/lroc_features/Apollo%2011/feature_highlights
On this page you will find one of the images put into additional context if you click the boxes below the image (scale, nomenclature, etc): http://www.lroc.asu.edu/featured_sites/view_site/14
Another interesting consequence of having been to the moon is the Lunar Laser Ranging experiments that have only been made possible by retroreflectors planted on the moon during the Apollo missions. Bouncing lasers off the moon has allowed us to measure the distance between the earth and moon with unprecedented detail. In fact, with this information, we have been able to determine that the moon is spiraling away from the earth at a rate of 3.8cm / year.
Honestly, a conspiracy of this magnitude would be more impressive than the act of landing on the moon itself.
Nope – moon is way to far to see such things with a earth based telescope.
Look into ‘index of refraction;’ if you want the reason.
However there have been various space-born images taken of the site.
Agreed,, you can’t see that kind of detail through the atmosphere, and the above group of commenting dimwits obviously are unaware.. bringing us to the images from space… all of which seem to be from the source itself (ie, NASA), which can’t be held reliable (photo-shopped images are common in their world).. are there any truly independent third party pics of the “sites”.., and after 40 years its hard to imagine that the solar wind has not had some impact on the moons surface.. with no real atmosphere it is exposed to perturbations by the forces of the Sun, etc.. therefore obscuring any ‘trails or tracks’ that were supposedly left behind…
From a purely scientific point of view, the NASA evidence is really dodgy..with no collaboration..
[As a point of reference, I am a US born (West ‘by God’ Virginia), US educated PhD (computer engineering – University of California) — and I watched all the moon landing bullshit in the 60’s and don’t believe a bit of it, we were duped.. and apparently still continues today for some of the weaker thinkers amoung us]
Wut?
The landing sites are still very visible. Look at the LRO images as linked above.
umm…. the moon’s surface only changes when it’s hit with something or there’s a moonquake. Solar wind doesn’t change the surface in any way measurable by your eyes. Those footprints are still there.
Oh please! The UK had the brave people of UFO guarding the NASA efforts. And don’t forget their Moonbase Alpha. Remember when the Moon was thrown out of its orbit? And the Thunderbirds of International Rescue! Not to mention Fireball XL-5 and Captain Scarlet. (Dr. Who was partial to the UK, but as an alien, can’t be counted). Plus known to very few, the F1 engine is a Rolls-Royce Merlin F1 from the Supercar project, and an elaborate ruse was developed to divert attention to Penemunde and the V2 as the source of US engine development. But, I may have revealed too much already.
Some people accuse me of having a “Can-Do” attitude. I’m more of a “I don’t know that It’s not possible so I’ll do it anyways” Or I like to call it “Productively ignorant” because it’s always the experienced/seasoned jerks who say something can’t be done.
http://www.gocomics.com/garfield/1982/01/19
I know perfectly what you mean. I have been learning to write OpenGL-software in one week, have been flying homebuilt aircraft “’cause it looks O.K. to me” and am generally holding the notion that I will find out early enough what’s going to kill me. It’s not that these enterprises never fail, but I don’t fail more often than your average engineer, and I get to see more interesting things than other people.
And, being the experienced jerk (thank you for the title), I hardly ever say ‘can’t be done’. I just say: “there’s a high risk with that”.
http://www.aulis.com/stereoparallax.htm
Anomaly hunting… completely ignoring everything else that is easily provable in order to sustain the fantasy… a bit sad, really.
It is for $ – all these types of things are for money at the end of the day. They used to sell pamphlets, now they sell google advert spots and give the ‘information’ away free.
Regardless of the validity of the landing, which is quite preposterous to question, would not the technological advances garnered from the hoax outweigh the hoax. I don’t know about you but I find aluminum foil to be amazingly useful.
I’ll just leave this here https://www.youtube.com/watch?v=-f_DPrSEOEo
But seriously moon landing deniers discredit actual conspiracy truths. They also discredit the crazier conspiracy that maybe some of the footage was faked because they found alot more then they bargained for up there. Especially on the darkside of the moon. Why build a space station when you could build a terrestrial moon base? A moon base makes way more sense for comfort and logistics as far as burying most of it with regolith for radiation protection, However the dV required to build on the moon is probably the biggest disadvantage. I believe it takes around 2200 m/s dV to land from low moon orbit.
The universe is simply too large not to have fostered other intelligent life, wether they are benevolent is questionable, but maybe they don’t want a war crazy intelligent race controlled by a small minority on the moon.
Don’t get me started on idiots claiming the modern car has more computing power than the lunar lander. It certaintly doesn’t have more computing power in regards to landing a module. The system was engineered spectacularly to be as simple as possible this is a good thing in regards to system failure.
Good video for all the shadow idiots https://youtu.be/m3RxSL4Pra8?t=1825
You’re confusing good design with raw horse-power. The AGC is certainly outclassed by most pocket-electronics, and probably a couple performance ECUs. But at +2MHz and 2/36kwords of various memory it’s not hard to do. Direct comparisons between purpose built single task computers and general computers isn’t a good one though.
Some of the moon landing denial is bound to be funded by US government in order to discredit more meaningful ruminations in conspiracy circles – this is obvious.
I even am willing to believe the new ‘the moon is a hologram!’ nonsense is straight out of our governments mouth.
However, most of these types of things are promoted by cynical individuals who have grown up to be maudlin scam artists.
I agree completely. If the moon landing was a conspiracy its the least meaningful or purposeful one of all.
Very interesting story, thanks for writing it up. All astronauts are heroes. It takes real gumption to strap yourself on top of a rocket that’s about to go off.
Conspiracy proposal: US government orchestrates “moon landing deniers” for the purpose of defunding NASA after it served its political purpose in the 60s and 70s.
LOL. That one at least would make more sense than the usual suspects.
The videos wont play :(
Talk to as many people who walked on the moon as you can, there aren’t that many left and the way things are going now there damn sure won’t be any for the foreseeable future, the sad thing here is not the number of people who say we didn’t go to the moon (although that’s pretty f**king sad) the sad thing is that we went to the moon 40 years ago and WE HAVE NOT BEEN BACK SINCE! (Now there is something to make up a conspiracy theory about!)
We found out it wasn’t made of cheese, so pfft on that.
We haven’t been back to the moon, because it’s not worth the enormous expense for very little in return.
I worked on a project with the Air Force in the early 1990’s with Dave Scott. I got to know him pretty well over several months. He’s quite a character and we all loved his Apollo stories. I’ll never forget the night of our successful test. We had an impromptu celebration party at the house of one of the engineers. We got to drink a beer with him outside in the backyard looking up at the moon. He said it was like visiting an old friend.
+1
Eddie Izzard – Landing on the Moon
Was extremely fortunate to meet and hang out briefly with Alan Bean, the third man to set foot on the moon. He was addressing a convention for which I was the lead a/v technician, so we got to spend a bit of time together during rehearsal. The Hubble was being upgraded that very weekend, and I had the honor of briefing Capt. Bean on the mission progress, which I had been following closely (but due to his busy schedule, he had not).
Definitely one of the high-points of my life.
https://www.facebook.com/photo.php?fbid=1069635584228&l=c0ccd08532
A great operational history of the Moon Launch that really gets across the scale of what we accomplished is ‘Moon Launch!: A History of the Saturn-Apollo Launch Operations’:
http://upf.com/book.asp?id=BENS2S01
It talks in depth about what it took to build capabilities from literally nothing to the scale it took to accomplish the task in such a short span of time. Really great reading if you are into this sort of thing.
Great article, enjoyed the tid bits on the rover sliding down the hill and was kinda surprised on his kind words on the LM trainer. Looked like a death trap from the destruction video.
Don’t feed the trolls.
Aww man! Why isn’t there a video of his presentation?